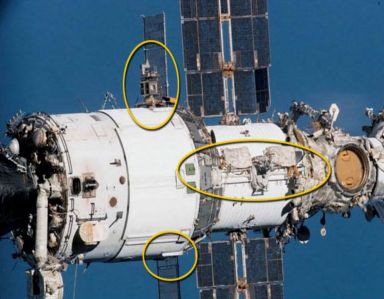
Am heutigen Montag absolvierten zwei Mitglieder der Expedition 25 einen Außenbordeinsatz. Die beiden Kosmonauten Fjodor Jurtschichin und Oleg Skripotschka rüsteten das Swesdamodul aus und entfernen Experimente u.a. der ESA (Europäische Weltraumagentur) von dem Modul. Ferner sollte eine Kamera am Modul Rasswet umgesetzt werden, was nicht gelang.
Ein Beitrag von Dominic Decoen. Quelle: www.nasa.gov; www.roscosmos.ru, raumfahrer.net. Vertont von Peter Rittinger.
Die beiden Kosmonauten Fjodor Jurtschichin, mit seinem fünften Weltraumausstieg und Oleg Skripotschka, mit seinem ersten hatten zahlreiche Aufgaben auszuführen. Jurtschichin trug den Anzug mit den roten Streifen, während Skripotschka blauen Streifen auf seiem Orlananzug hatte. Der Außenbordeinsatz begann um 15.54 Uhr mit dem Ausstieg aus dem russischen Pirsmodul.
(Bild: www.nasa.gov)
Die Hauptaufgabe war das Anbringen einer Arbeitsplattform am russischen Teil der ISS, genauer am Servicemodul Swesda. Um 17.15 Uhr MEZ wurde diese Aufgabe von den beiden Kosmonauten erfolgreich absolviert. Anschließend widmeten sich die beiden dem Deinstallieren eines Subsystems des deutschen ROKVISS-Experiments, genauer gesagt, bauten sie Kontur ab.
ROKVISS (Robotik-Komponenten-Verifikation auf der ISS) wurde in Deutschland geplant und entwickelt. Der auf der ISS montierte 50 cm große und sieben Kilogramm schwere Roboterarm mit zwei Gelenken, einem Metallfinger und zwei integrierten Kameras basiert auf der neuesten Leichtbauroboter-Technologie des DLR. Er soll in nicht ferner Zukunft bei Reparatur- oder Montagearbeiten im freien Weltraum eine wichtige Rolle spielen, ähnlich dem amerikanischen Roboterarm Dextre. Der Roboter hat nur noch eine minimale Zeitverzögerung, wenn Befehle an ROKVISS übermittelt werden (20 ms) und wieder an die Bodenstation zurück, dies ist der größte Vorteil des deutschen ROKVISS. Kein anderer Roboter an Bord der ISS weist so eine geringe Verzögerung auf. Ziel der Experimente mit ROKVISS ist es, die neue Roboterhardware und leistungsfähige Steuerungskonzepte im realistischen Missionsbetrieb im freien Weltraum zu testen und zu verifizieren. Am 24. Dezember 2004 war der deutsche Roboterarm vom russischen Weltraumbahnhof Baikonur mit einer Sojus-U-Rakete zur ISS gebracht worden. Die Außenmontage übernahmen am 26. Januar 2005 zwei Kosmonauten während eines etwa sechsstündigen „Weltraumspaziergangs“.
Kontur wurde um 19.00 Uhr zurück in Pirs gebracht und Oleg Skripotschka nahm auf dem Rückweg das russischen Experiment SKK mit, welches am MIM-2-Modul (Poisk) installiert wurde. Um 19.15 Uhr war diese Aufgabe zur Zufriedenheit der russischen Weltraumagentur erledigt. Die vorletzte Aufgabe von Fjodor Jurtschichin und Oleg Skripotschka war des Abmontieren des Expose-R-Experiments der europäischen Weltraumagentur ESA. Es befand sich seit dem 10.04.2009 außerhalb der ISS, auf einer beweglichen Arbeitsplattform, ebenfalls am Servicemodul Swesda. Gegen 19.45 Uhr war auch diese Aufgabe erledigt und Expose-R wurde in die russische Ausstiegsschleuse Pirs gebracht. Die letzte Aufgabe konnte leider nicht vollendet werden, weil sich die Kamera nicht am dafür vorgesehenen Platz installieren ließ. Die beiden Raumfahrer nahmen die Kamera mit in das Ausstiegsmodul Pirs.
Um 22.22 Uhr MEZ endete der russische Weltraumausstieg mit erschöpften aber zufriedenen Kosmonauten, die nur eine Aufgabe nicht erledigen konnten. Die Gesamtzeit des Ausstieges betrug 6 Stunden und 27 Minuten.
Raumcon: