In den nächsten Jahren soll es erhebliche Umbauten an der Internationalen Raumstation geben. Damit soll auch ein längerer Betrieb vorbereitet werden.
Ein Beitrag von Günther Glatzel. Quelle: Roskosmos, Energija, NASA. Vertont von Peter Rittinger.

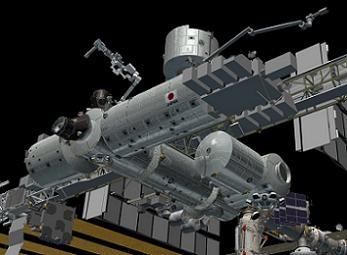
(Bild: NASA)
Beginnen soll die Umorganisation zunächst mit dem Ablegen des bisherigen Schleusenmoduls Pirs vom unteren Kopplungsaggregat am Kopfteil von Swesda. Dies könnte Ende dieses Jahres erfolgen. Der Frachter Progress-M 20M, der am 27. Juli von Baikonur aus gestartet ist und am Folgetag an Pirs andockte, soll das seit 2001 an der Station befindliche Modul beim Abflug in einigen Monaten einfach mitnehmen. Bei weiteren Verzögerungen soll dies dessen Nachfolger Progress-M 22M übernehmen. Pirs verglüht dann mit dem Frachter weitgehend in den dichten Schichten der Erdatmosphäre.
An die frei gewordene Kopplungsstelle kommt dann das Wissenschaftsmodul Naúka (sprich: Na-u-ka). Dieses könnte wohl Anfang 2014 starten. Es ist äußerlich dem Modul Sarja sehr ähnlich, da es aus dem Reservemodul für den FGB abgeleitet wurde. Im Inneren befindet sich aber auch ein Schlafquartier während an der Außenseite der Europäische Roboterarm ERA operieren wird. Kurze Zeit später sollen dann am Kopfteil die bereits im All befindliche Experimentierschleuse und an der Seite ein Radiator zur Abführung von Wärme montiert werden.
Nach gegenwärtigen Plänen etwa Mitte 2014 folgt dann das Kopplungsmodul UM, dass am Nadir-Port von Naúka ankoppeln soll. Hier stehen dann 5 weitere Kopplungsstellen zur Verfügung, von denen eine etwa 2016 mit einem ersten Wissenschafts- und Energiemodul NEM besetzt werden soll.
(Bild: NASA)
Zwischendurch möchte auch die NASA den US-basierten Teil für die weitere Nutzung fit machen. Dazu sollen zwei Kopplungsstellen für autonom andockende Raumschiffe am Bug und zwei für Transportraumschiffe, die mittels Manipulatorarm an der Station festgemacht werden, am Kiel geschaffen werden. Letzteres soll bewerkstelligt werden, indem das Lagermodul PMM (Leonardo) im Juli 2015 vom nach unten gerichteten Port an Unity (Node 1) zum nach vorn gerichteten Port an Tranquility (Node 3) versetzt wird. Damit sind dann die beiden unteren Kopplungsstellen an Harmony (Node 2) und Unity frei und gleichzeitig von einem Ankerpunkt des Canadarm2 erreichbar. Auf diese Weise könnten sich durchaus zwei Missionen von Kounotori, Dragon oder Cygnus zeitweilig überschneiden.
Für die bemannten Raumschiffe wird eine Kopplung mittels Manipulatorarm nicht in Betracht gezogen. Bei einer Evakuierung wäre kein Personal zu dessen Bedienung mehr an Bord der Station. Auf eine Fernbedienung von der Erde aus will man sich in einem solchen Falle verständlicherweise nicht verlassen. Also werden passende Kopplungsaggregate an den anfliegenden Raumschiffen benötigt. Zunächst soll der Adapter PMA 3 von der Backbordseite von Tranquility (Node 3) zu Harmony-Zenit verlegt werden. Anschließend sollen ab Mai 2015 neue Kopplungsaggregate nach dem Soft Impact Mating Attenuation Concept (SIMAC) über die alten gestülpt werden. Die Raumschiffe verwenden dann das passende Gegenstück, was deutlich leichter ist, allerdings große Ähnlichkeiten zum bisher dort montierten APAS-System aufweist, aber in den USA gebaut wird.

Am Ende stehen dann im vorderen Teil je zwei Kopplungsstellen für bemannte bzw. unbemannte Raumschiffe zur Verfügung, am hinteren Teil der ISS sechs Kopplungsstellen für bemannte oder unbemannte Raumschiffe russischer Bauart. Eine Verlängerung der Betriebsdauer der Internationalen Raumstation wäre dann auch über 2020 hinaus möglich. Sogar einer Aufstockung der Besatzungsstärke sowie kürzeren Besuchsbesatzungen stände wenig im Wege.
Die ersten bemannten Schiffe, welche über kommerzielle Partner der NASA in den USA entwickelt werden, könnten ab 2017 an der ISS festmachen. Bereits für 2015 ist zudem das Ankoppeln eines BEAM (Bigelow Expandable Activity Module) genannten entfaltbaren Moduls geplant. Es soll an den rückwärts gerichteten Port an Tranquility angedockt werden.