Trotz eines kürzlich aufgetretenen Problems mit dem Marsorbiter MRO, welcher sich in der vergangenen Woche über mehrere Tage hinweg in einem Sicherheitsmodus befand, konnte der Marsrover Curiosity seine Fahrt auch in den vergangenen Tagen erfolgreich fortsetzen. Der Mars Reconnaissance Orbiter befindet sich mittlerweile wieder im normalen Betriebsmodus.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS.
(Bild: NASA, JPL-Caltech)
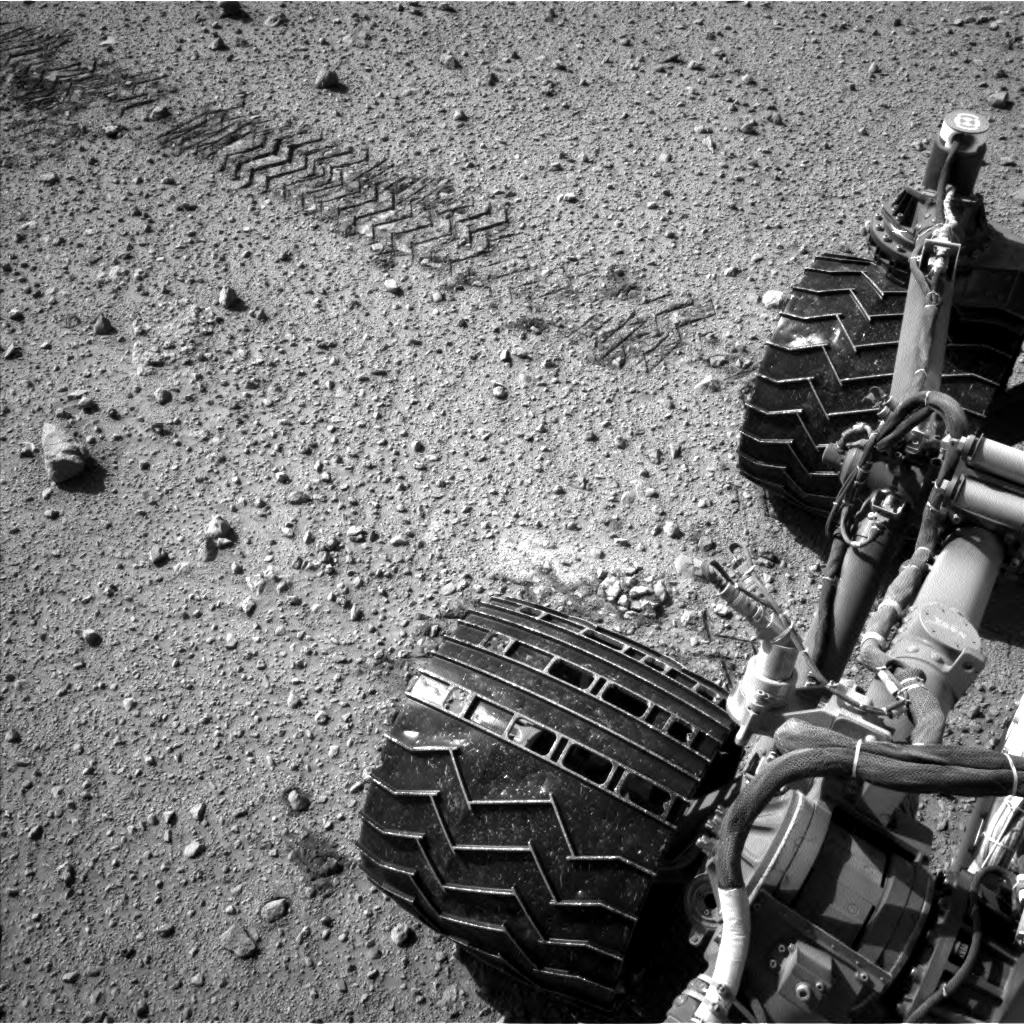
Seit unserem letzten ausführlichen Bericht über die Mission des Rovers Curiosity hat sich dieser von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover im Rahmen von mehreren Fahrten um weitere rund 660 Meter in die grob südliche Richtung bewegt und dabei seinem nächsten Etappenziel, einer mit dem Namen „Kimberley“ belegten Oberflächenformation, weiter genähert. Die meisten dieser Fahrten führten über Distanzen zwischen 30 und 70 Metern pro Tag und waren so ausgelegt, dass an den Endpunkten der jeweiligen Tagesetappen neben der routinemäßiger erfolgenden Anfertigung von diversen Fotoaufnahmen nur grundlegende wissenschaftliche Untersuchungen, aber kaum zeitintensivere Analysen durchgeführt wurden.
(Bild: NASA, JPL-Caltech)
Bei der Durchführung dieser Fahrt ließ sich der Rover auch nicht durch ein zwischenzeitlich aufgetretenes Problem mit dem ebenfalls von der NASA betriebenen Marsorbiter Mars Reconnaissance Orbiter (MRO) behindern, welcher sich am 9. März 2014 aufgrund eines unvorhergesehenen Umschaltens des Hauptcomputers auf das baugleiche Backup-System in einen Sicherheitsmodus versetzte. Im Gegensatz zu vergleichbaren Vorfällen in der Vergangenheit schaltete diesmal auch das Kommunikationssystem des MRO auf einen Backup-Radiotransponder um. Einhergehend mit dem Übertritt in den „Safe Mode“ beendete der MRO – wie für solche Fälle vorgesehen – alle nicht unmittelbar für die Sicherheit des Orbiters zwingend notwendigen Aktivitäten und wartete zunächst auf weiterführende Kommandos von seinem am Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien befindlichen Kontrollzentrum.
Da der MRO allerdings auch als primäre Relaisstation für den Datenaustausch zwischen dem Marsrover Curiosity und dem ebenfalls am JPL befindlichen Roverkontrollzentrum eingesetzt wird, hatte dies zur Folge, dass die Datenübertragungsrate zwischen der Erde und dem Rover deutlich abfiel. Trotzdem standen den für die Planungen der Fahrten von Curiosity verantwortlichen Roverdrivern genügend Daten zur Verfügung, um auch in den folgenden Tagen weitere Fahrten durchzuführen.
Als Relaisstation für die Übermittlung der für die Planung dieser Fahrten zwingend notwendigen Daten – neben den aktuellen Telemetriewerten des Rovers handelt es sich hierbei in erster Linie um hochaufgelöste Fotoaufnahmen, welche das Gebiet der zukünftig einzuschlagenden Route zeigen – wurde der zweite derzeit aktive Marsorbiter der NASA, der Orbiter Mars Odyssey, eingesetzt.
Parallel dazu waren die für die Kontrolle des MRO verantwortlichen Techniker und Ingenieure des JPL damit beschäftigt, die Ursache für den Sicherheitsmodus zu ergründen und diesen Orbiter wieder in den normalen Betriebsmodus zu versetzen, was letztendlich am 13. März 2014 gelang. Als erstes wissenschaftliches Instrument wurde dabei die HiRISE-Kamera des Orbiters reaktiviert, welche noch am selben Tag erste Testaufnahmen von der Marsoberfläche anfertigen konnte. Seit diesem Tag wird der Orbiter auch wieder als Relaisstation zwischen Erde und Mars genutzt. Die genaue Ursache für diesen unvorhergesehenen Sicherheitsmodus wurde von der NASA bisher allerdings nicht bekannt gegeben.
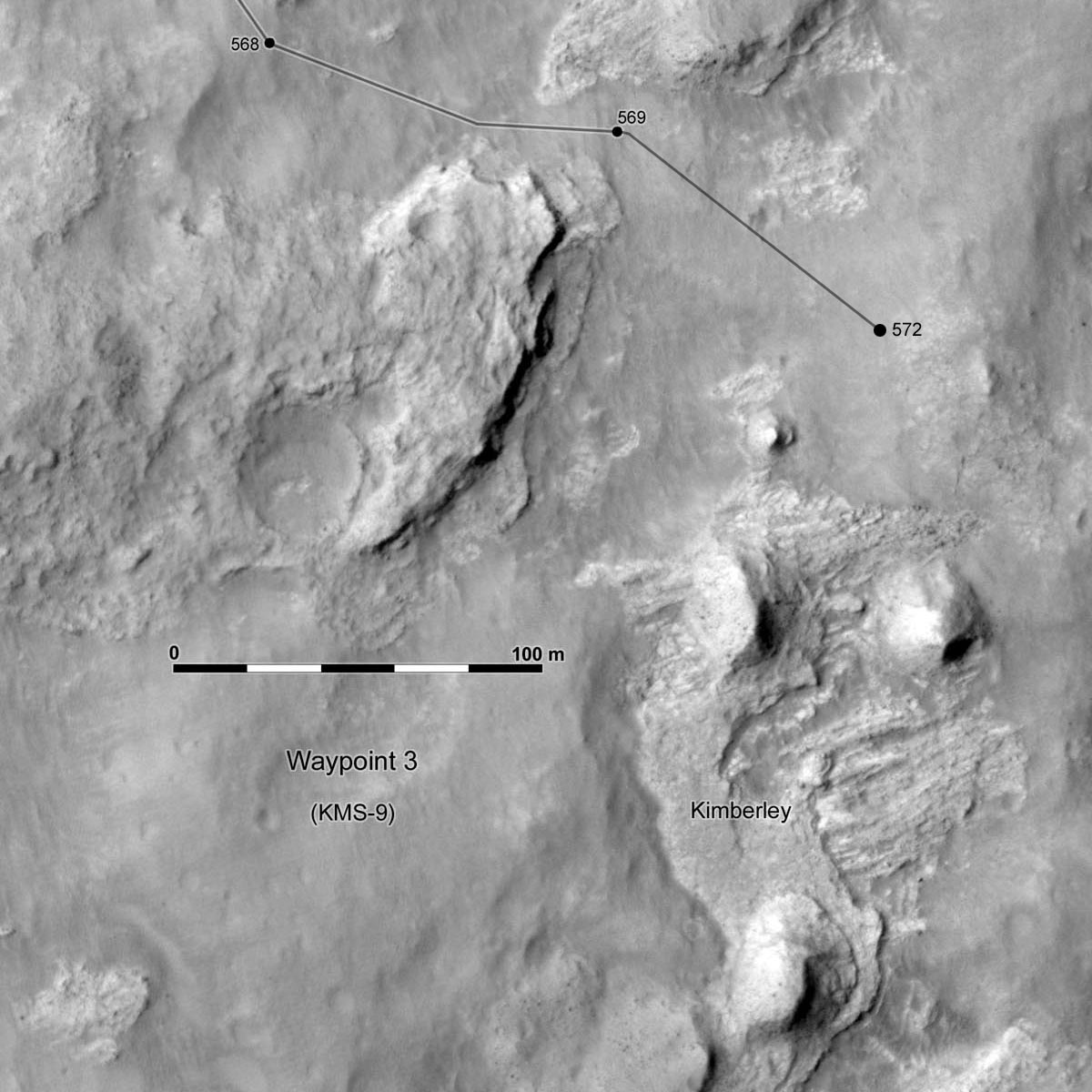
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Nach der Beendigung des Safe Mode des Orbiters MRO hat Curiosity am 13. und am 16. März im Rahmen von zwei weiteren Etappen weitere rund 99 beziehungsweise 88 Meter überbrückt. Das nächste Etappenziel des Rovers, die als einer von mehreren „Waypoints“ ausgewählte Region „Kimberley“, ist gegenwärtig noch etwa 200 Meter von der aktuellen Position entfernt und wird voraussichtlich im Verlauf der kommenden Woche erreicht.
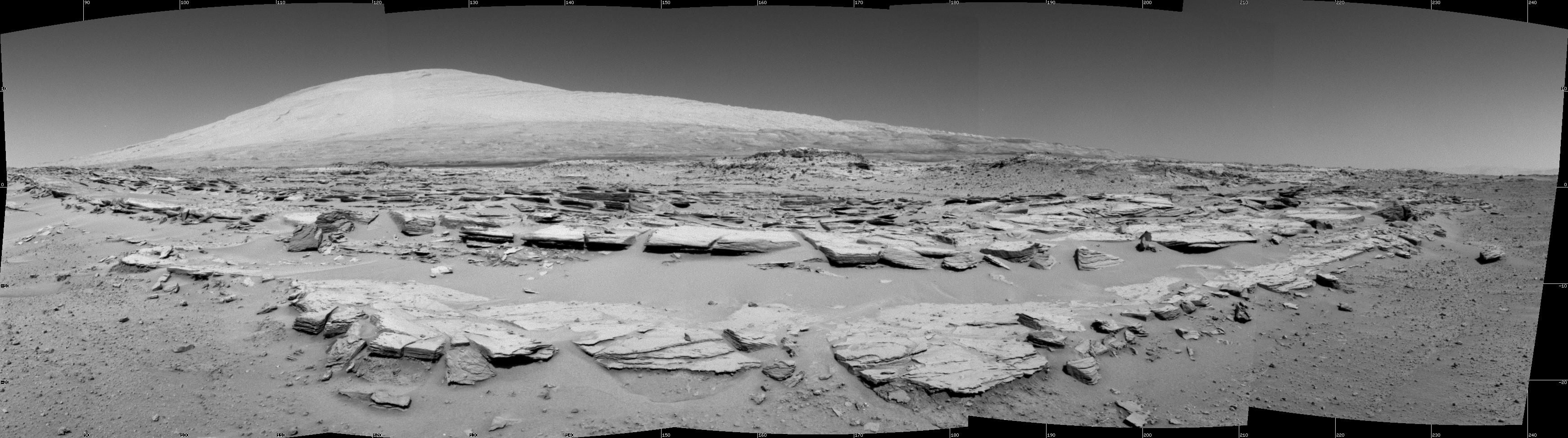
Bei diesen „Waypoints“ handelt es sich um Bereiche im Inneren des Gale-Kraters, wo Curiosity jeweils mehrtägige Stopps für ausführlichere wissenschaftliche Untersuchungen einlegen soll. Das wissenschaftliche Ziel dieser Analysen besteht darin, Informationen über die Geologie des Geländes zu sammeln, welches sich zwischen dem Landegebiet des Rovers und dem Aeolis Mons befindet. Diese Daten sollen den Wissenschaftlern dabei helfen, die zwischenzeitlich gewonnenen Informationen in einen Kontext zu den Erkenntnissen zu setzen, welche zukünftig bei den geschichteten Gesteinsablagerungen des Zentralberges erlangt werden sollen. Ein spezielles Augenmerk soll dabei auf geologische Strukturen gerichtet werden, welche offensichtlich durch fließendes Wasser erzeugt beziehungsweise verändert wurden.
„Im Bereich von KMS-9 [eine weitere Bezeichnung für die Region Kimberley] zeigen die Orbitaufnahmen drei verschiedene Geländetypen und eine relativ staubfreie Oberfläche“, so Katie Stock vom California Institute of Technology (CIT), eine der an der Mission beteiligten Wissenschaftlerinnen. „Wir erkennen dort Geländeformen, denen wir mit Curiosity zuvor noch nicht begegnet sind. An einer Stelle sind Riefelungen auf der Oberfläche zu sehen, die alle in die gleiche Richtung zeigen. Andere Bereiche erscheinen glatt und es existieren keine Riefelungen. Wir wissen nicht, was das ist. Aber das ist gerade so spannend an dieser Erkundungsmission – wir sehen immer wieder neue Dinge.“
Entsprechend der Zielsetzung für die Untersuchung der Waypoints soll in der Umgebung von Kimberley auch erneut das Bohrsystem des Rovers dazu eingesetzt, um eine weitere Bodenprobe zu entnehmen und anschließend mit den Analyseinstrumenten eingehender zu untersuchen.
Bis zum heutigen Tag, dem „Sol“ 573 seiner Mission, hat der Marsrover Curiosity mit seinen Kamerasystemen 131.132 Bilder aufgenommen und an das Roverkontrollzentrum des JPL übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Verwandte Meldungen bei Raumfahrer.net:
- Curiosity: Zwei längere Fahrten im Rückwärtsgang (22. Februar 2014)
- Curiosity überschreitet die Fünf-Kilometer-Marke (12. Februar 2014)
- Marsrover Curiosity setzt seine Untersuchungen fort (8. Februar 2014)
- Curiosity hat die Sanddüne überquert (7. Februar 2014)
- Marsrover Curiosity hat Dingo Gap erreicht (1. Februar 2014)
- Marsrover Curiosity ändert den Kurs (25. Januar 2014)
- Marsorbiter MRO fotografiert Curiositys Radspuren (10. Januar 2014)
- Curiosity: Software-Upgrade und Überprüfung der Räder (22. Dezember 2013)
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: