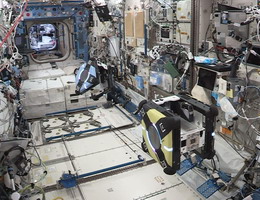
Projekt TumbleDock/ROAM auf der ISS: Miniroboter üben Einfangen von Weltraumschrott
Die Aufgabe für den kleinen Roboter ist anspruchsvoll: Der Astrobee Honey soll den Astrobee Bumble einfangen und mitnehmen. Dazu muss Honey die Flugbahn von Bumble in Schwerelosigkeit verstehen, sich in die richtige Position bringen und einen Zusammenstoß auf jeden Fall vermeiden. Eine Pressemitteilung des Deutschen Zentrums für Luft- und Raumfahrt (DLR). Quelle: DLR. 22. März […]
Projekt TumbleDock/ROAM auf der ISS: Miniroboter üben Einfangen von Weltraumschrott Weiterlesen »