Von der ISS aus steuerte NASA-Astronaut Frank Rubio gleichzeitig mehrere Roboter auf der Erde. Er ließ sie nach Bedarf teil- oder vollautonom agieren. Diese Mensch-Roboter-Kollaboration ist weltweit einmalig und der erfolgreiche Auftakt einer neuen ISS-Experimentreihe. Eine Pressemitteilung des Deutschen Zentrums für Luft- und Raumfahrt (DLR).
Quelle: DLR 25. Juli 2023.

25. Juli 2023 – Das Weltall, den Mond oder den Mars erkunden – dazu entwickelt das Deutsche Zentrum für Luft- und Raumfahrt (DLR) Schlüsseltechnologien wie die Telepräsenz-Robotik. So könnten Roboter auf einem fernen Planeten Aufgaben erledigen, die ein Mensch vom Raumschiff im Orbit aus kommandiert. Wie das künftig funktionieren kann, hat nun das Missionsteam „Surface Avatar“ am DLR in Oberpfaffenhofen gezeigt: Von der Internationalen Raumstation ISS aus steuerte eine einzelne Person, NASA-Astronaut Frank Rubio, gleichzeitig mehrere Roboter auf der Erde und ließ sie nach Bedarf teil- oder vollautonom agieren. Diese Kollaboration von Mensch und Roboterteam ist weltweit einmalig und der erfolgreiche Auftakt einer neuen ISS-Experimentreihe.

Das Projekt Surface Avatar wird vom DLR-Institut für Robotik und Mechatronik geleitet und erfolgt in Zusammenarbeit mit der Europäischen Weltraumorganisation ESA.
„Für uns ist es sehr wichtig, den Aspekt der Mensch-Roboter-Kollaboration in den Vordergrund zu stellen, um Astronautinnen und Astronauten die optimale Unterstützung bereitzustellen. Dazu haben wir vor Jahren bereits die Technologie der kollaborativen Roboter entwickelt, die mittlerweile auch terrestrisch breit eingesetzt wird.
Mit den neuesten Durchbrüchen in der KI werden Roboter so vielseitig und intelligent, dass sie leicht auch von Nicht-Robotikern genutzt werden können“, erklärt Prof. Alin Albu-Schäffer, Direktor des DLR-Instituts für Robotik und Mechatronik.
Das Robotikteam verfolgt mit den Experimenten zwei Ziele: Zum einen soll demonstriert werden, wie unterschiedliche Roboter zusammen komplexe Aufgaben für Weltraummissionen erledigen können. Zum anderen untersucht das Team die Variationen, wie sich die Roboter telekommandieren lassen, um diese als intelligente Co-Worker jederzeit genau so einzusetzen, wie es die Situation erfordert.

Arbeiten von manuell bis voll automatisiert
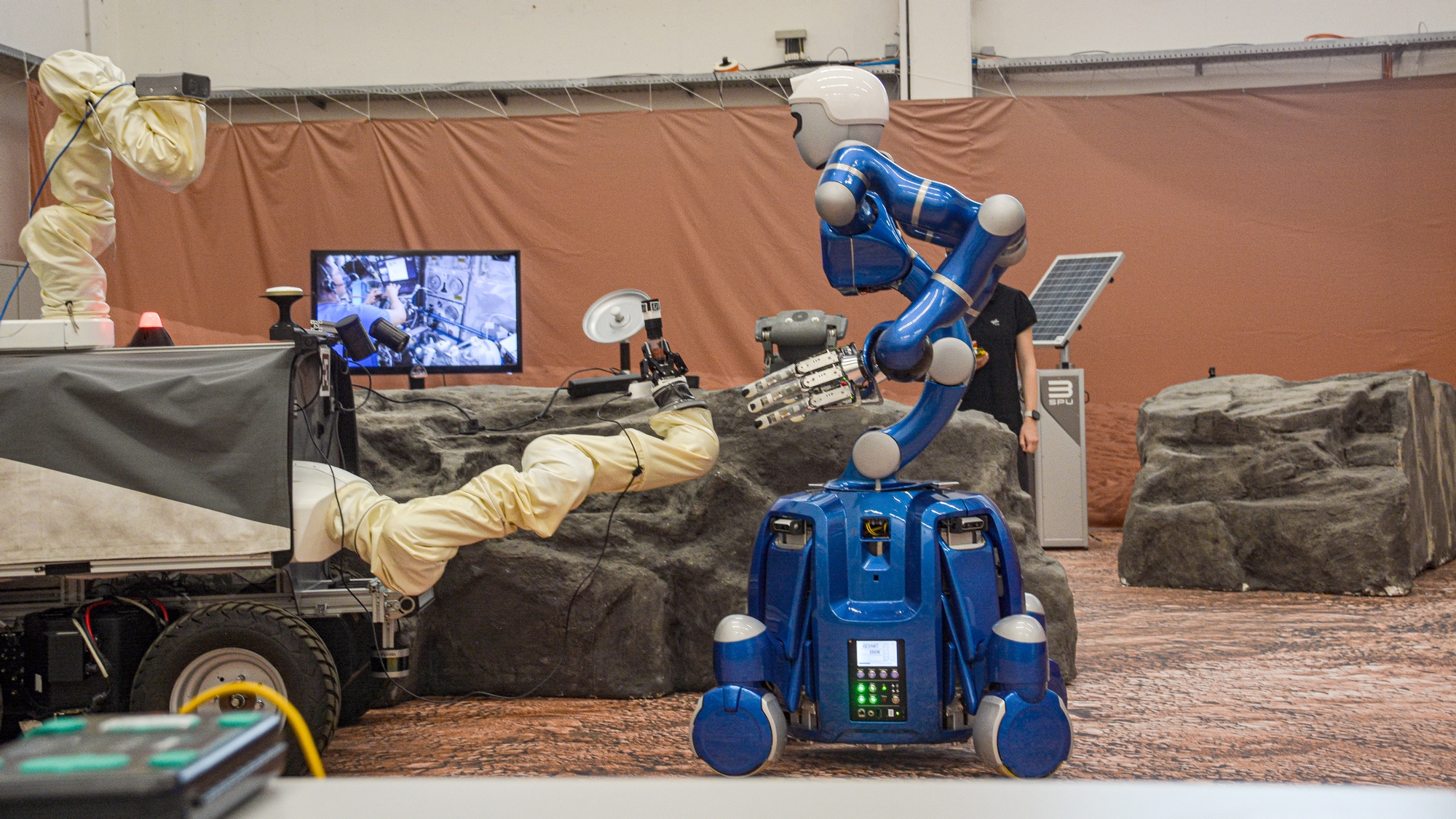
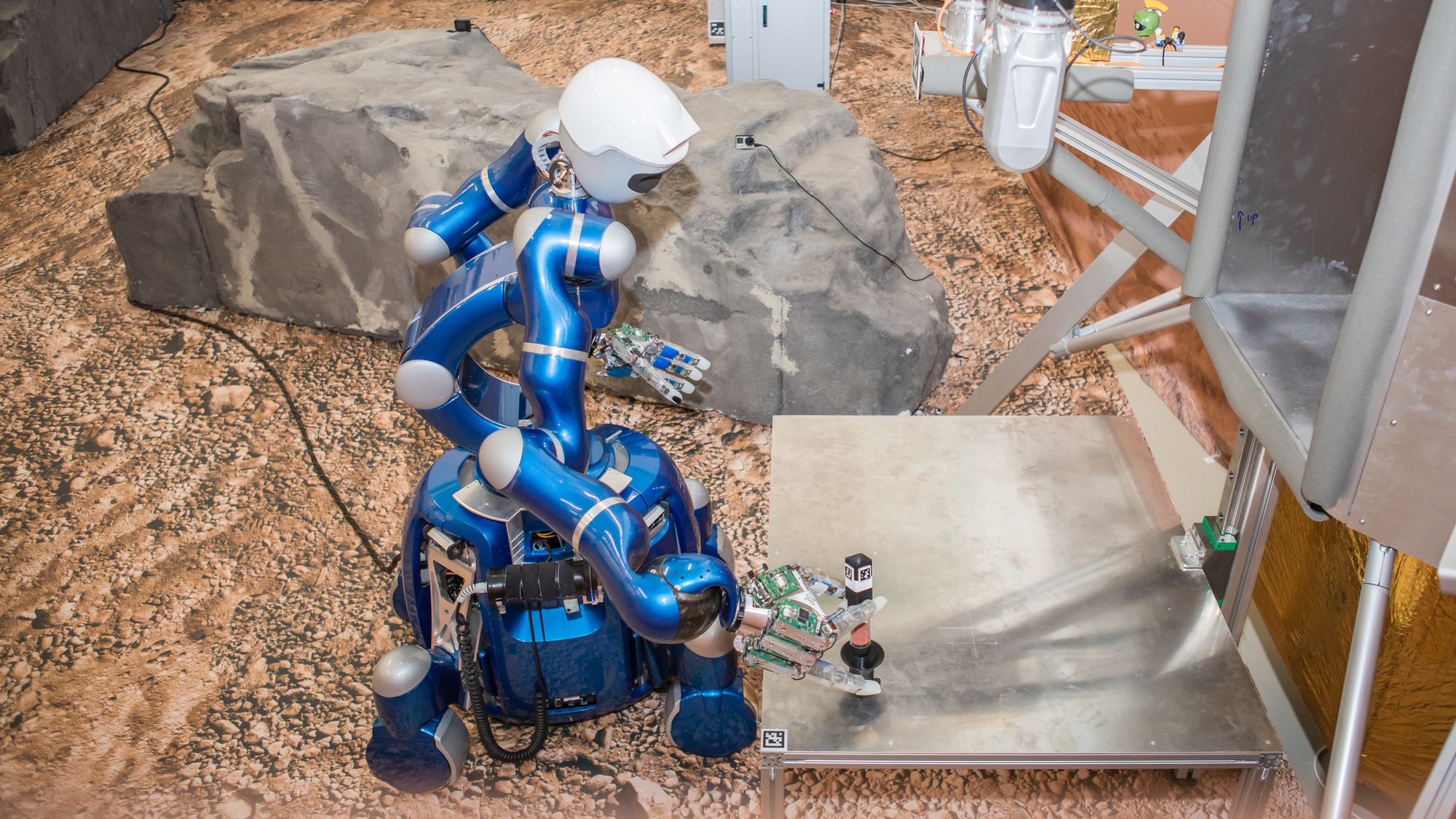
Für das aktuelle Experiment wurde im Deutschen Raumfahrtkontrollzentrum am DLR-Standort in Oberpfaffenhofen eine Marslandschaft aufgebaut. In dem Szenario sollten drei Roboter als „Vorhut“ des Menschen erste Arbeiten auf der Planetenoberfläche ausführen.
Astronaut Frank Rubio kommandierte die Roboter vom Columbus-Modul der ISS aus und konnte in der zweistündigen Versuchszeit alle Aufgaben umsetzen: Mithilfe des humanoiden DLR-Roboters Rollin’ Justin entlud er den Lander und installierte einen seismischen Sensor. Den Interact Rover der ESA nutzte der Astronaut zur Überwachung des Geländes und den DLR-Lander LAMA zur Unterstützung der wissenschaftlichen Aktivitäten.
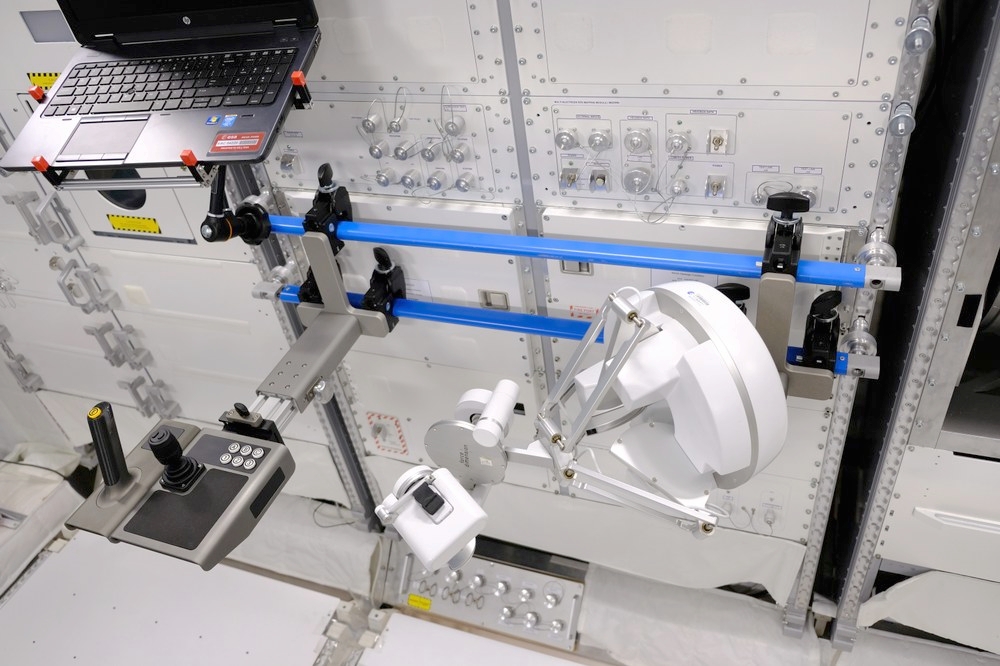
Als völlig neue Technologie testete Rubio eine Steuerung mit skalierbarer Autonomie. Er konnte also bestimmen, in welchem Umfang ein Roboter eine Aktion selbstständig ausführen soll. Per Knopfdruck konnte er einen Roboter eine Aufgabe vollständig autonom ausführen lassen. Der Astronaut konnte aber auch als Avatar den Roboter übernehmen und einzelne Arbeitsschritte wie mit eigener Hand ausführen. Dazu stand ihm das Robot Command Terminal (RCT) zur Verfügung, das drei Bedienelemente vereint: Über einen Bildschirm konnte er jederzeit sehen, was der einzelne Roboter sieht, mithilfe eines Joysticks die Bewegungen steuern und dank eines Interaktionsgeräts mit Kraftrückkoppelung fühlen, was der Roboter „fühlt“.
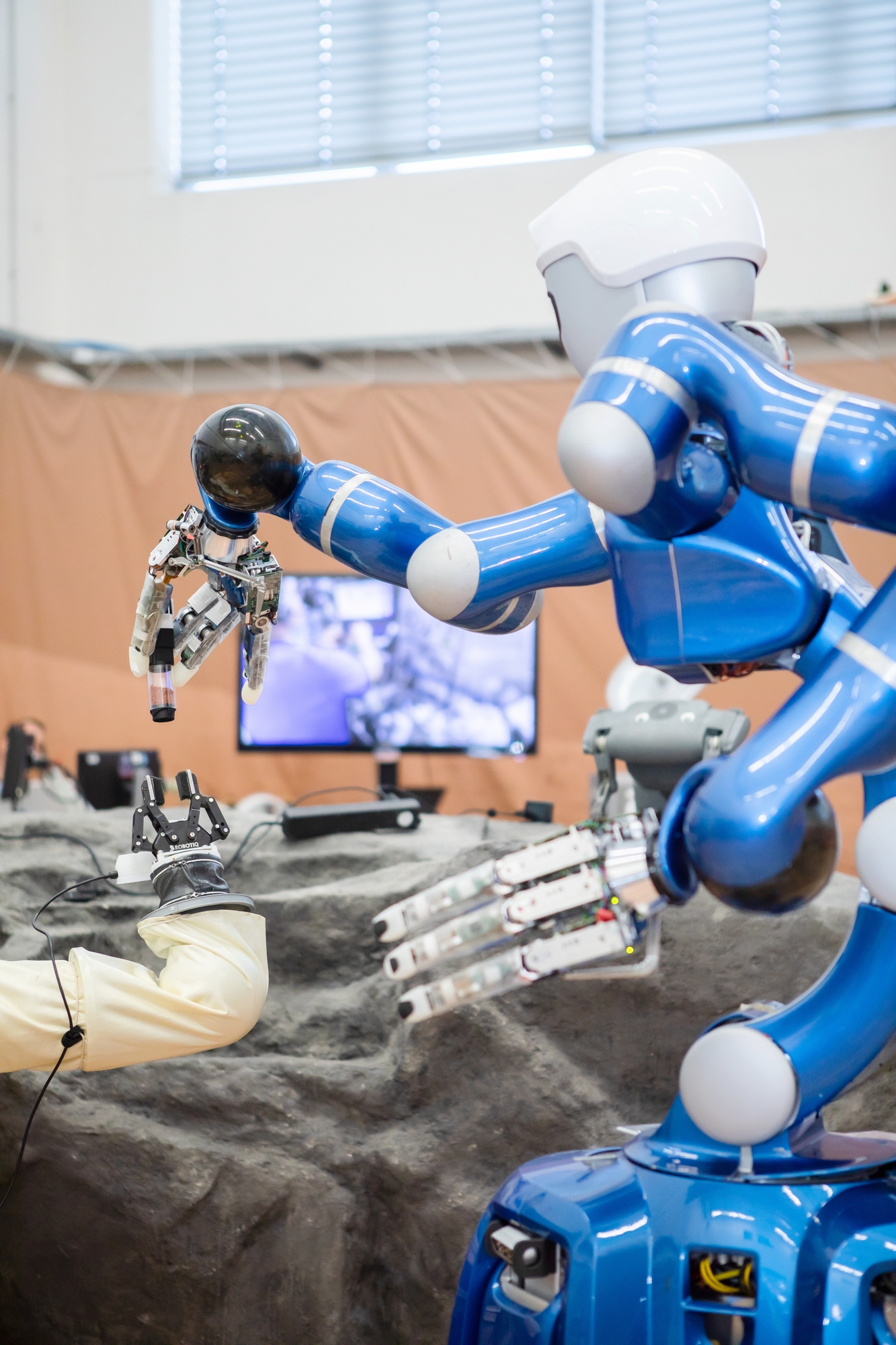
Als Frank Rubio als Rollin‘ Justin zum Beispiel ein Seismometer auf der simulierten Planetenoberfläche platzierte, spürte der Astronaut den Widerstand des Instruments in der Hand.
Zusammenarbeit am Boden und im All
Das RCT ist intuitiv bedienbar, sodass sich der Astronaut schnell an die Tele-Steuerung gewöhnte. Die meisten Aufgaben konnte er dadurch ohne Hilfestellung umsetzen. Das Robotikteam überwachte das Experiment vom Marslabor in Oberpfaffenhofen aus und stand in Funkkontakt mit dem US-Amerikaner auf der ISS.
„Wir freuen uns, einen Schritt weiter zu sein, um Raumfahrenden und Expertinnen und Experten auf der Erde eine breite Palette von Möglichkeiten anzubieten und ganze Teams aus verschiedenen Robotern vom Weltraum aus zu steuern und zu verwalten. Wir werden künftig in der Lage sein, unsere Roboter auf der Oberfläche als ihre physischen Avatare und als intelligente Mitarbeitende zu nutzen, die immer komplexere Aufgaben ausführen“, sagt Principal Investigator Dr. Neal Y. Lii vom DLR-Institut für Robotik und Mechatronik.
„Diese Mensch-Roboter-Kollaboration ebnet den Weg für zukünftige Missionen und permanente Außenposten auf dem Mond und darüber hinaus“, ergänzt ESA-Projektleiter Dr. Thomas Krüger vom ESA Human-Robot Interaction Laboratory.
Damit sich das Projektteam auf das fachliche Geschehen konzentrieren konnte, wurden sie von den Kolleginnen und Kollegen des Columbus-Kontrollzentrums unterstützt. So sorgte das Betriebsteam für die technischen Voraussetzungen und behielt im Blick, dass Surface Avatar und die anderen Aktivitäten an Bord der ISS aufeinander abgestimmt waren.

Zukunft Mond und Mars
Nach der erfolgreichen Technologiedemonstration folgt nun die detaillierte Auswertung sowie die Vorbereitung der nächsten Simulationen. Surface Avatar sieht mindestens drei Experimente im Abstand von rund sechs Monaten vor, die immer umfangreicher und komplexer werden. Die Forschenden von DLR und ESA werden die Fähigkeiten und Telekommandierung der Roboter dazu gezielt weiterentwickeln. Hinzukommen wird auch DLR-Roboter Bert, der mit seinem hundeähnlichen Körper auf vier Beinen auch unwegsames Gelände erkunden kann. „Es geht darum, den Einsatz von intelligenten Robotern zusammen mit Astronautinnen und Astronauten zu demonstrieren und zu üben und die Schnittstellen weiterhin zu verbessern, um die Technologie in den nächsten Missionen zum Mond und später zum Mars einzusetzen“, fasst Prof. Albu-Schäffer zusammen.
Roboter können überall dort eingesetzt werden, wo es für den Menschen zu gefährlich ist. Erkundungsmissionen im Weltraum sind ohne robotische Unterstützung daher undenkbar. Für künftige Missionen wird die Interaktion von Mensch und Roboter eine noch wichtigere Rolle spielen. Aus den Surface-Avatar-Experimenten gewinnen die Forschenden dazu grundlegende Daten, zum Beispiel wie sich die Latenzzeiten auf die Steuerung auswirken, wie die Schwerelosigkeit die Wahrnehmung des Astronauten beeinflusst und welche Herausforderungen sich im Betrieb stellen. Für das kommende Lunar Gateway und andere Missionen zum Mond oder Mars wird Surface Avatar die Telerobotik somit entscheidend weiterbringen.
Diskutieren Sie mit im Raumcon-Forum: