Der Marsrover Curiosity hat seine Untersuchungen bei der Gesteinsformation Cooperstown am vergangenen Montag beendet. Nach der Übermittlung eines Software-Updates soll der Rover demnächst seine Fahrt zum Zentralberg des Gale-Kraters fortsetzen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS.
(Bild: NASA, JPL-Caltech)
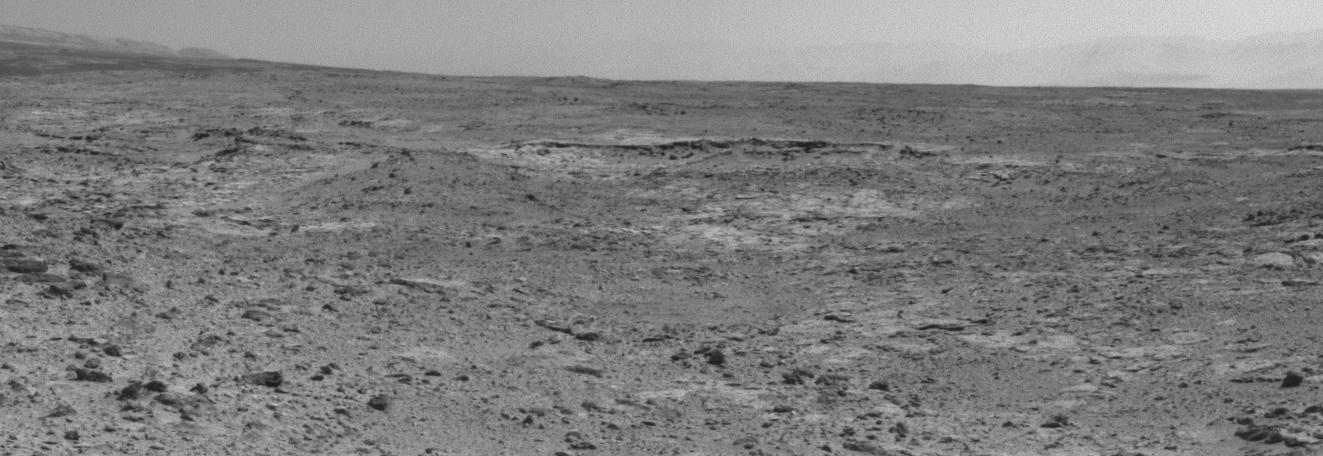
Seit unserem letzten kurzen Statusbericht hat sich der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity auf seinem Weg zu dem im Inneren des Gale-Kraters gelegenen Zentralberg Aeolis Mons dem mit dem Namen „Cooperstown“ belegten „Waypoint 2“ im Rahmen mehrerer Fahrten angenähert und diese Gesteinsformation am vergangenen Wochenende eingehend untersucht. Teilbereiche der zwischenzeitlich zurückgelegten Strecke wurden dabei von dem Rover erfolgreich im sogenannten „autonomen Navigationsmodus“ überbrückt.
(Bild: NASA, JPL-Caltech)
Aufgrund der großen Distanz zwischen Erde und Mars – abhängig von der Konstellation der beiden Planeten kann die Signallaufzeit bis zu 22 Minuten betragen – kann Curiosity von den für die Steuerung des Rovers verantwortlichen Roverdrivern des Jet Propulsion Laboratory (JPL) nicht etwa mittels eines Joysticks in „Echtzeit“ navigiert werden. Vielmehr müssen sämtliche von dem Rover zu absolvierenden Manöver bis ins Detail im Voraus geplant und festgelegt werden. Nach der Übertragung der entsprechenden Kommandosequenzen führt der Rover diese Manöver dann selbstständig durch.
Durch diese notwendige Vorgehensweise ist die Länge der im Rahmen einer einzelnen Fahrt zurückzulegenden Strecke selbst unter günstigen Umständen normalerweise auf eine Distanz von maximal etwa 100 Metern begrenzt. Dies entspricht der Entfernung, in der die Kamerasysteme des Rovers die Umgebung in einer für die Planung einer zukünftigen Fahrt ausreichend hohen Auflösung wiedergeben können. Bei einer schlechten Sicht auf die zukünftig zu passierenden Oberflächenbereiche fallen die Fahrten dagegen normalerweise entsprechend kürzer aus.
Autonome Navigation
Allerdings ist der Rover in der Lage, dieses Manko auszugleichen, indem er sich im Anschluss an eine vorprogrammierte Fahrt selbstständig und ohne jegliche direkte Hilfestellung durch die Roverdriver des JPL im „autonomen Navigationsmodus“ fortbewegt. In diesem Autonav-Modus fertigt der Rover vor dem Beginn einer Vorwärtsbewegung mit seinen Gefahrenerkennungs- und Navigationskameras Fotoaufnahmen des vorausliegenden Geländes an. Jeweils zwei Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab. Diese Aufnahmen werden von der „Drive-Software“ des Rovers zu Stereoaufnahmen kombiniert, welche im Gegensatz zu konventionellen 2D-Aufnahmen auch ein räumlicher Eindruck der Landschaft vermitteln. Die so gewonnenen Daten des umgebenden Geländes werden anschließend autonom ausgewertet.
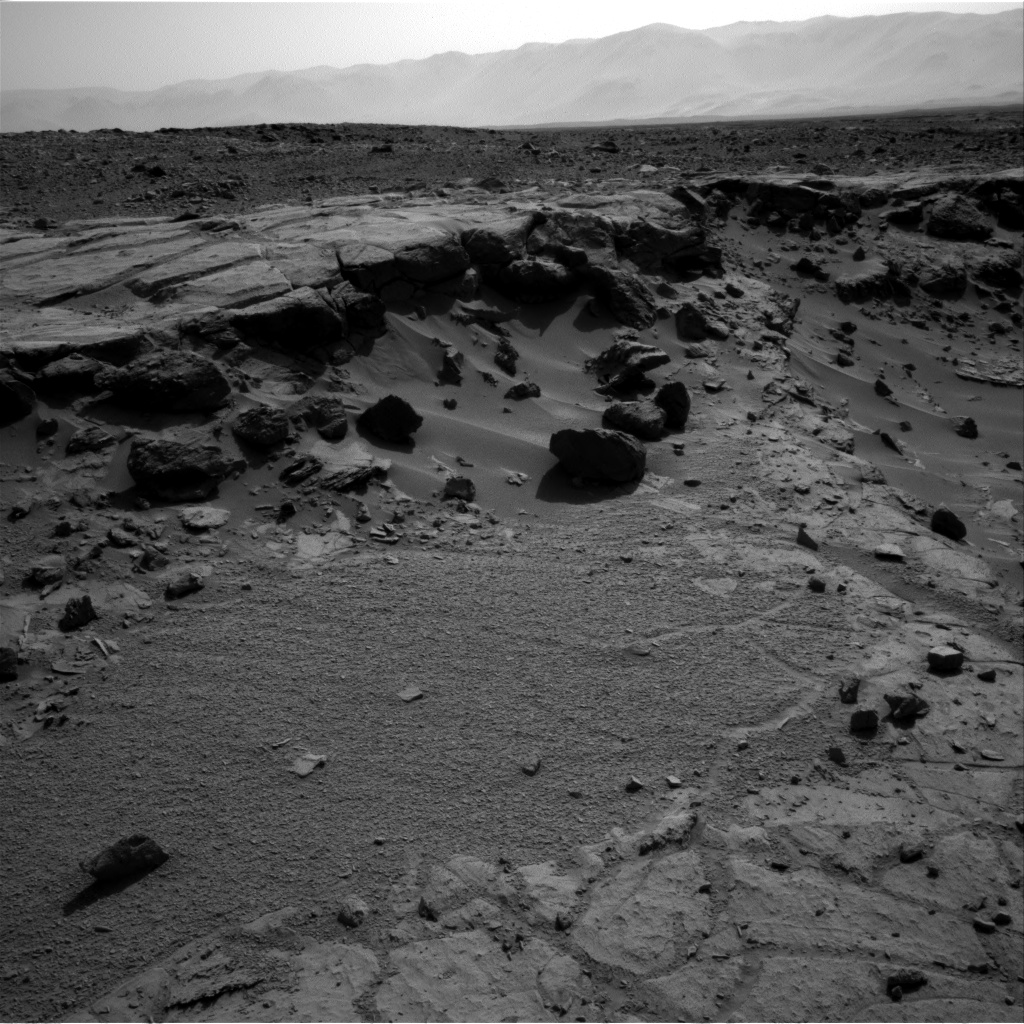
(Bild: NASA, JPL-Caltech)
Aus diesen Informationen berechnet die Software von Curiosity anschließend einen sicheren Weg zu dem vorgegebenen Ziel. Der Rover fährt dann auf dieser Route ein kurzes Stück, stoppt anschließend nach wenigen Metern und überprüft die Telemetriewerte und neu angefertigte Aufnahmen der Umgebung dahingehend, ob diese kurze Fahrt den gewünschten Geländegewinn erbracht hat. Anschließend wird diese Prozedur wiederholt – und das solange, bis entweder der als „Zielgebiet“ angesteuerte Bereich erreicht ist oder bis die Telemetrie eine nicht mehr akzeptable Abweichung von den vorgegebenen Parametern aufweist.
Der Vorteil der autonomen Navigation liegt auf der Hand: Durch diese Vorgehensweise lassen sich größere Strecken auf der Marsoberfläche deutlich schneller als bisher üblich überbrücken, da der Rover so auch Abschnitte passieren kann, welche vom jeweiligen Startpunkt einer Fahrt nicht vollständig einsehbar und somit von den Roverdrivern nicht programmierbar sind. Der Rover kann dabei sogar an einem Tag eine autonome Fahrt auf dem Mars beenden und seine Fahrt am darauf folgenden Tag ohne weitere Kommandos von der Erde im selben autonomen Fahrmodus fortsetzen. Erstmals war dies jetzt am 28. und 29. Oktober der Fall. Durch entsprechend konservativ gewählte Sicherheitsparameter lässt sich dabei das Risiko für den Rover minimieren.
Cooperstown
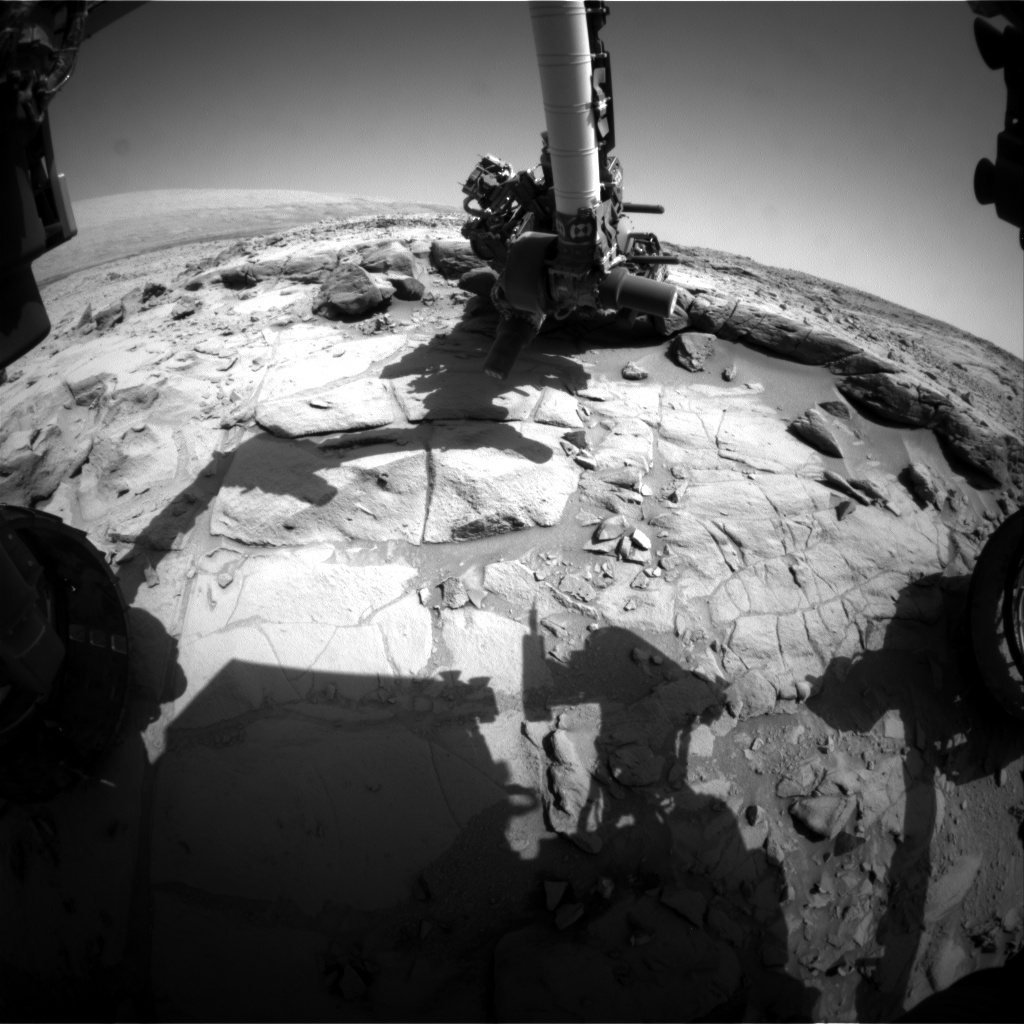
Durch eine Fahrt über rund 27 Meter näherte sich Curiosity der Gesteinsformation Cooperstown am 31. Oktober bis auf wenige Meter und führte anschließend verschiedene Messungen durch. Neben der wissenschaftlichen Hauptkamera, der MastCam, kam dabei auch die ChemCam zum Einsatz. Im Rahmen einer weitere Fahrt über 5,18 Meter gelangte das dort befindliche Gestein am darauf folgenden Tag in die Reichweite der beiden am Roboterarm montierten Instrumente, dem APX-Spektrometer und der MAHLI-Kamera. In den folgenden Tagen wurde die Gesteinsformation dann ausführlich untersucht.
„Was uns hier besonders interessiert ist das dort befindliche geschichtete Material, welches wir bereits aus dem Orbit heraus erkennen können“, so Kevin Lewis von der Princeton University in New Jersey/USA. „Wir wollen herausfinden, ob uns diese lokale Gesteinsformation dabei helfen kann, die Geologie in Yellowknife Bay mit der Geologie beim Mount Sharp [so die inoffizielle Bezeichnung für den im Zentrum des Gale-Kraters gelegenen Berges Aeolis Mons] in Verbindung zu bringen.“ In der Region „Yellowknife Bay“ hatte Curiosity mehrere Bohrungen durchgeführt und in den dabei analysierten Bodenproben eindeutige Hinweise auf einen einstmals lebensfreundlicheren Mars gefunden (Raumfahrer.net berichtete).

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Software-Update
Die Untersuchungen bei Cooperstown wurden bereits am vergangenen Montag abgeschlossen. Vor einer Fortsetzung der Fahrt wird sich das Hauptaugenmerk der an der Mission beteiligten Ingenieure in den nächsten Tagen jedoch zunächst auf die Überspielung eines weiteren Updates der Software des Rovers richten. Durch dieses mittlerweile dritte Update, welches die Curiosity-Software seit der Landung des Rovers auf dem Mars erhält, sollen unter anderem die Fähigkeiten der autonomen Navigation erweitert werden. Beabsichtigt ist dabei unter anderem, die Abstände zwischen den einzelnen autonom durchzuführenden Fahrten noch weiter zu reduzieren. Außerdem wird die neue Version der Software dem Roboterarm neue Bewegungsabläufe ermöglichen, welche bei der zukünftigen Erforschung der Marsoberfläche von Bedeutung sein werden.
Die Übermittlung der neuen Softwareversion und anschließend durchzuführende ausführliche Tests werden voraussichtlich noch die gesamte Woche in Anspruch nehmen. Anschließend wird der Rover seine Fahrt in die südwestliche Richtung fortzusetzen. Dort befindet sich in einer Entfernung von rund 450 Metern der dritte von insgesamt fünf „Waypoints“, wo Curiosity auf seinem Weg zur Basis des Zentralberges Aeolis Mons mehrtägige Zwischenstopps für wissenschaftliche Untersuchungen einlegen soll.
Bis zum heutigen Tag, dem „Sol“ 445 seiner Mission, hat der Marsrover Curiosity eine Distanz von mehr als 4.000 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. Seit dem Erreichen des Mars haben die Kamerasysteme von Curiosity 99.218 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum: