Im Rahmen eines dichten Überfluges über die Oberfläche des Kometen 67P/Tschurjumow-Gerassimenko versetzte sich die Raumsonde Rosetta am vergangenen Wochenende in einen Sicherheitsmodus.
Erstellt von Ralph-Mirko Richter. Quelle: ESA
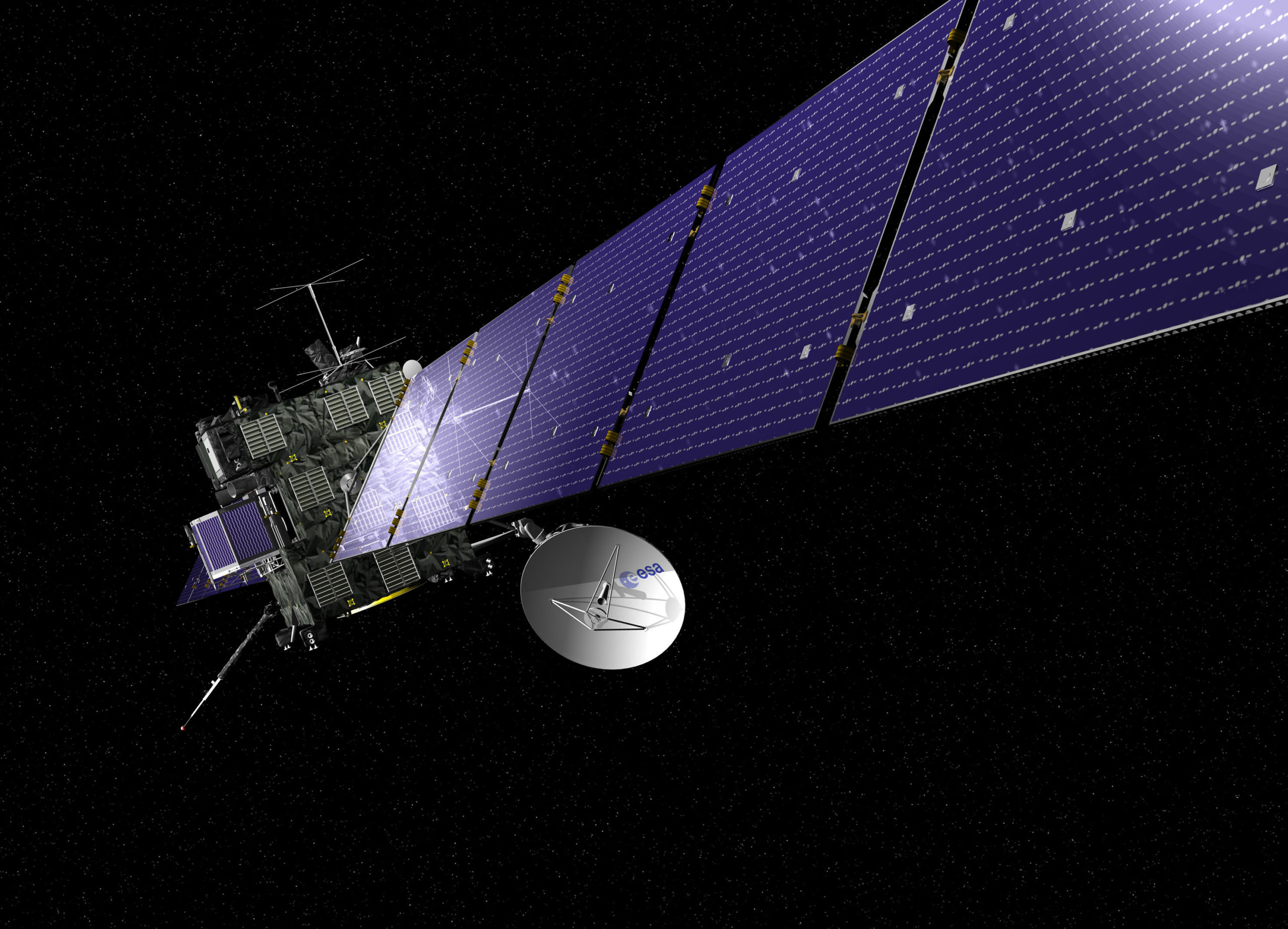
Rosetta. Für die Energieversorgung verfügt Rosetta
über zwei Solarpaneele, welche eine Gesamtfläche
von etwa 64 Quadratmetern aufweisen.
(Bild: ESA)
Nach einem mehr als zehn Jahre andauernden Flug erreichte die von der europäischen Weltraumagentur ESA betriebene Raumsonde Rosetta am 6. August 2014 das Ziel ihrer Reise – den Kometen 67P/Tschurjumow-Gerassimenko (der Einfachheit halber ab hier als „67P“ abgekürzt). Seitdem ‚begleitet‘ Rosetta diesen Kometen auf seinem weiteren Weg in das innere Sonnensystem und untersucht dieses Relikt aus der Entstehungsphase unseres Sonnensystems dabei aus einer in unterschiedlichen Entfernungen zur Kometenoberfläche verlaufenden Umlaufbahn heraus intensiv mit elf wissenschaftlichen Instrumenten.
Im Rahmen dieser Untersuchungen überflog Rosetta am Vormittag des 28. März 2015 die Oberfläche von 67P in einem Abstand von lediglich 14 Kilometern. Dieser in kurzer Distanz verlaufende Überflug bot den beteiligten Wissenschaftlern die erneute Möglichkeit, Details auf der Kometenoberfläche mit einer hohen Auflösung abzubilden und die den Kometen umgebende Koma zu untersuchen. Allerdings zeigte sich dabei auch erneut, dass derartig ’nahe‘ Begegnungen mit 67P nicht ohne ein gewisses Risiko sind, denn kurz nach der dichtesten Annäherung an die Kometenoberfläche versetzte sich die Raumsonde in einen Sicherheitsmodus.
Verfälschte Star-Tracker-Daten
Aufgrund der in den letzten Wochen durch die zunehmende Annäherung an die Sonne immer weiter ansteigenden kometaren Aktivität von 67P entweichen mittlerweile immer größere Mengen an Gasen von der Kometenoberfläche in das Weltall, welche dabei auch einen gewissen ‚Druck‘ auf die Raumsonde und deren zwei Solarpaneele, welche eine Gesamtfläche von etwa 64 Quadratmetern aufweisen, ausüben. Je dichter sich Rosetta dem Kometen annähert, desto größer fallen dabei auch die auftretenden Ablenkungen von der vorgesehenen Flugbahn aus. Der am 28. März gegebene Druck dieser Gaspartikel hatte zur Folge, dass sich die Orientierung Raumsonde im All minimal veränderte. Daraus resultierte letztendlich, dass die für die Kommunikation mit der Erde eingesetzte Hauptantenne von Rosetta nicht mehr direkt auf die für den Empfang von Radiosignalen vorgesehenen Empfangsstation des ESTRACK der ESA ausgerichtet war.
im Weltraum verfügt die Kometensonde Rosetta
über zwei Startracker-Kameras. Deren Position
ist in dieser Grafik rot markiert.
(Bild: ESA, ATG medialab)
Unter anderem um solchen voraussehbaren Ereignissen entgegenzuwirken verfügt die Raumsonde Rosetta zwecks der Bestimmung der aktuellen Flugbahn und der Ermittlung der dabei gegebenen Orientierung im Raum über sogenannte Sternsensoren. Hierbei handelt es sich um zwei redundante Kamerasysteme, welche in regelmäßigen Abständen den Sternenhimmel abbilden und die dabei erkannten Sterne mit einer Sternkarte abgleichen. Aufgrund der dadurch gewonnenen Daten zur Lageorientierung kann Rosetta die Position im All autonom erkennen und anschließend gegebenenfalls selbstständig korrigieren – so jedenfalls die Theorie.
Es war bereits im Vorfeld der Mission bekannt, dass die Startracker nicht nur zuvor definierte Hintergrundsterne, sondern auch von dem Kometen entweichende Staubpartikel registrieren werden. Aufgrund dieser die Sternsensoren beeinflussenden Partikel sind die Startracker und die für die Bearbeitung eingesetzte Software auf bis zu 1.000 ‚falsche‘ Objekte pro Foto ausgelegt. Allerdings konnten die Star-Mapper von Rosetta am 28. März während der Phase der dichtesten Annäherung der Raumsonde an die Oberfläche von 67P die hierfür ausgewählten Sterne dennoch nicht mehr einwandfrei identifizieren, da sich einfach zu viele Staubpartikel durch das Sichtfeld der Kamera bewegten, welche dabei die Aufnahmedaten verfälschten.
Während des Überfluges des Kometen registrierte das Kontrollsystem der Raumsonde diverse Fehlermeldungen. Hunderte von Staubpartikeln wurden dabei innerhalb kürzester Zeit von der entsprechenden Software fälschlicherweise als Hintergrundsterne interpretiert. Erst etwa 24 Stunden nach dem erstmaligen Auftreten dieses Problems hatte sich die Situation soweit beruhigt, dass die beide Startracker-Systeme wieder verwertbare Daten liefern konnten.
Allerdings hatte sich die Orientierung der Raumsonde im All in der Zwischenzeit so sehr verändert, dass die Hauptantenne nicht mehr einwandfrei auf die Erde ausgerichtet und eine Kommunikation mit der Bodenstation nahezu unmöglich war. Weitere Fehlermeldungen der Startracker-Software führten dann in den folgenden Stunden zudem zu einer ungewöhnlichen Häufung von Fehlermeldungen im Routinebetrieb der Raumsonde. Dies hatten letztendlich zur Folge, dass sich Rosetta schließlich am vergangenen Sonntag in einen vorsorglichen Sicherheitsmodus versetzte.
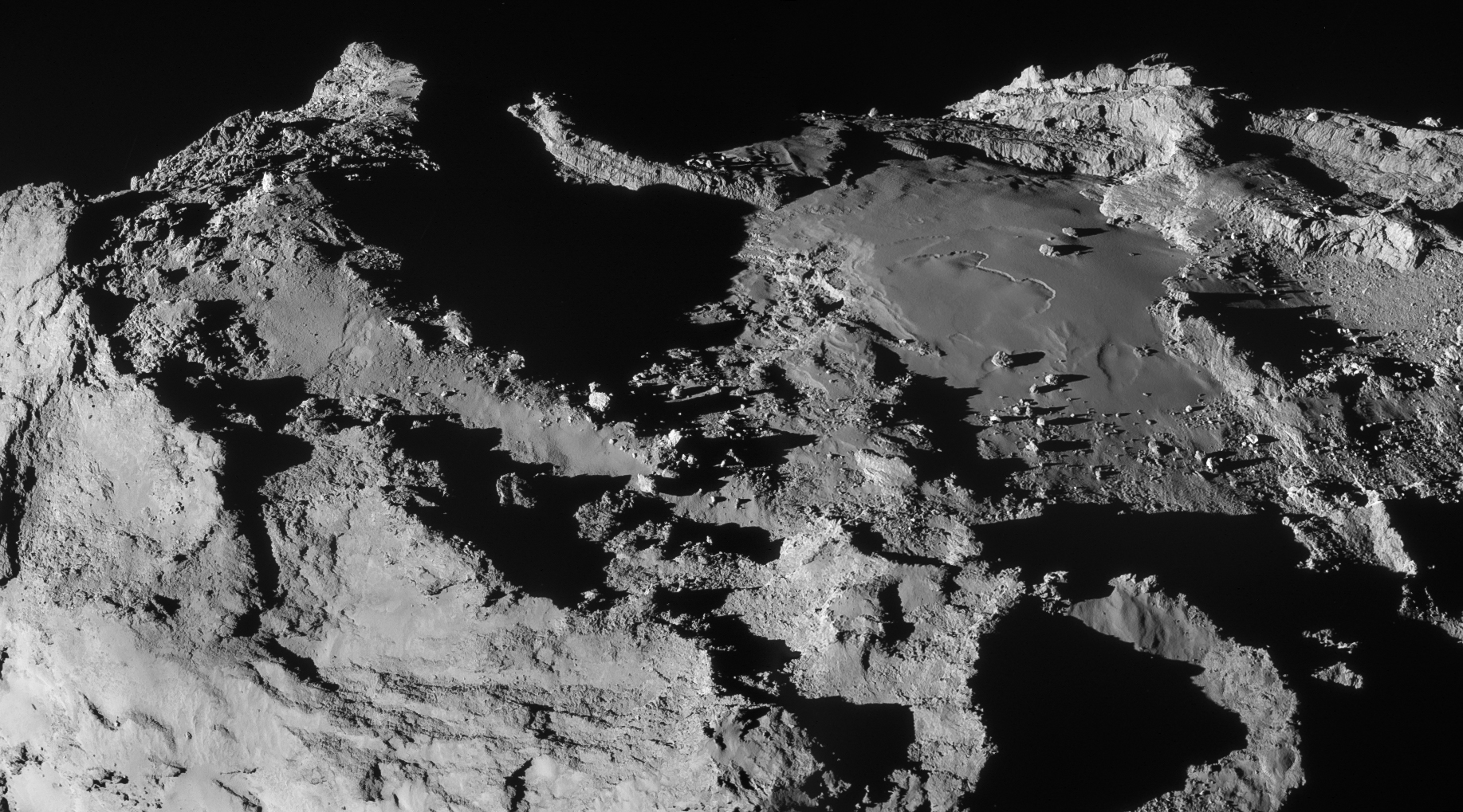
Navigationsprobleme konnte die Raumsonde
Rosetta an diesem Tag diverse Daten von dem
Kometen 67P aufzeichnen. Diese Aufnahme fertigte
dabei zum Beispiel die Navigationskamera der
Raumsonde aus einer Entfernung von
19,9 Kilometern zum Zentrum des Kometen
an. Die dabei erreichte Auflösung liegt bei
1,7 Metern pro Pixel. Der abgebildete Bereich
umfasst ein Areal von 3,1 x 1,7 Kilometer.
(Bild: ESA, Rosetta, NavCam – CC BY-SA IGO 3.0)
Bereits am darauf folgenden Tag konnte das für die Steuerung von Rosetta verantwortliche Team des ESOC jedoch wieder den normalen Betrieb der Raumsonde etablieren. Das primäre Ziel bestand dabei zunächst in der Wiederaufnahme des regulären Flugbetriebes, bei dem sich Rosetta am 1. April 2015 in einer Entfernung von etwa 400 Kilometern zur Kometenoberfläche befand. Diesem Orbitverlauf folgend wird sich die Raumsonde der Kometenoberfläche am kommenden Mittwoch zunächst wieder bis auf etwa 140 Kilometer annähern und dabei weitere Daten sammeln. Allerdings, so die Mitarbeiter der Mission, könnte es noch mehrere Wochen dauern, bis alle elf Instrumente der Raumsonde wieder vollständig in Betrieb genommen werden können.
Derzeit sind die Mitarbeiter der Rosetta-Mission damit beschäftigt, diesen am vergangenen Wochenende erfolgten Vorfall, welcher zudem mit einem bereits am 14. Februar 2015 erfolgten Ereignis vergleichbar ist, zu analysieren. Auch in Zukunft – so jedenfalls die bisherigen Planungen – soll der Komet 67P in kurzen Entfernungen von der Raumsonde passiert werden. Dies macht jedoch nur wenig Sinn, wenn sich der Kometenorbiter dabei in einen Sicherheitsmodus versetzt oder wenn dabei sogar die allgemeine Sicherheit von Rosetta gefährdet wird.
Philae
Keinen Einfluss wird die gegenwärtige Situation dagegen laut dem aktuellen Planungsstand auf die weitere Suche nach dem Kometenlander Philae haben (Raumfahrer.net berichtete). Wie geplant soll die nächste ‚Horchkampagne‘ nach einem Lebenszeichen von Philae bereits im April durchgeführt werden.
Diskutieren Sie mit im Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: