Der von der NASA betriebene Marsrover Opportunity befindet sich nach wie vor in einem guten technischen Zustand und kann die Zeit bis zum Erreichen des noch über zehn Kilometer entfernten Endeavour-Kraters mit Hilfe einer neuen Fahrtechnik eventuell um mehrere Monate verkürzen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, Planetary Society, Malin Space Science Systems, Max-Planck-Institut für Chemie, Unmanned Spaceflight.
Vertont von Peter Rittinger.
(Bild: NASA, JPL-Caltech, Cornell University, Max-Planck-Institut für Chemie)
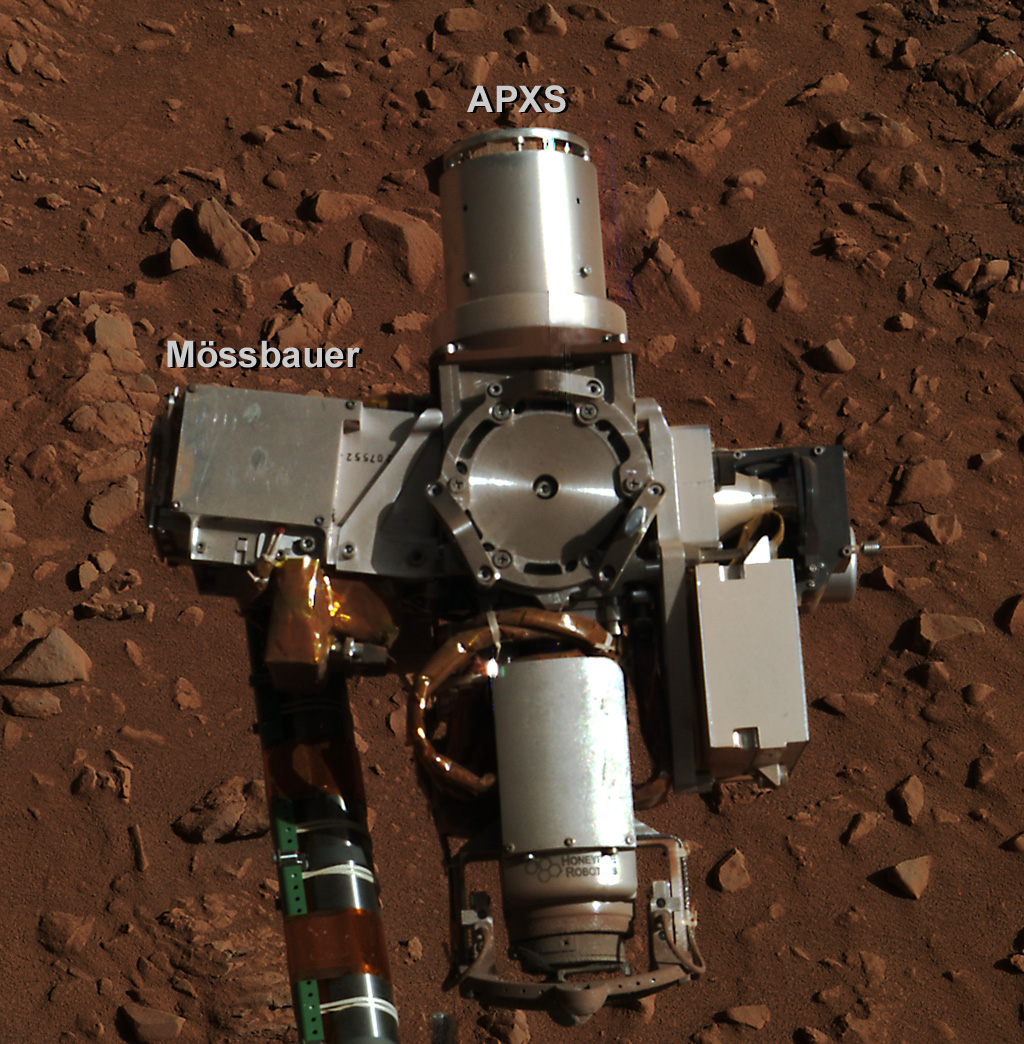
Seit dem letzten ausführlicheren Statusbericht über die Mission des Marsrovers Opportunity konnte sich dieser von der amerikanischen Weltraumbehörde NASA betriebene „Robotergeologe“ auch weiterhin erfolgreich in Richtung auf sein nächstes Ziel, den jetzt noch über zehn Kilometer entfernten Endeavour-Krater, bewegen. Am 8. Juli, dem Sol 2.295 der Opportunity-Mission, legte der Rover dabei weitere 68 Meter in die östliche Richtung zurück. Das anschließende Wochenende wurde mit der ausführlichen Untersuchung einer als „Juneau Road Cut“ bezeichneten Oberflächenformation aus offen zutage liegendem Grundgestein verbracht. Nach der Abbildung der Oberfläche durch ein am Instrumentenarm des Rovers befestigtes Mikroskop wurde die Oberfläche der Gesteinsschicht mit einem APXS-Spektrometer untersucht, um die genaue Zusammensetzung des Materials zu ermitteln.
Das APXS-Spektrometer verfügt an seinem Kopfende über ein Ringstück, welches über eine Isotopenquelle, es handelt sich hierbei um das radioaktiv strahlende Isotop Curium-244, verfügt. Bei den Messungen wird dieses Kopfstück direkt auf dem zu untersuchenden Objekt aufgesetzt. Die Isotopenquelle sendet bei der anschließenden Messung eine Alphastrahlung in Form von Heliumkernen aus, welche aus zwei Protonen und zwei Neutronen bestehen. Sobald die Heliumkerne in dem zu untersuchenden Objekt auf andere Atomkerne treffen, werden diese dabei abhängig von der Atommasse der getroffenen Atome auf eine charakteristische Art und Weise gestreut und abgelenkt. Misst man dabei den Winkel der erfolgten Ablenkung, so erhält man genaue Daten zur Masse der für die Ablenkung verantwortlichen Atomkerne und kann so auch die dafür verantwortlichen Elemente bestimmen. Aus der sich so ergebenden Zusammensetzung der verschiedenen Elemente kann wiederum auf das zugrunde liegende Mineral und daraus auf die Zusammensetzung der untersuchten Bodenformation geschlossen werden. Die APXS-Spektrometer der Mars Exploration Rover-Mission wurden am Max-Planck-Institut für Chemie in Mainz entwickelt.

(Bild: NASA, JPL, Cornell University, Animation: Raumfahrer_net)
Am 11. Juli 2010 wurde Opportunity während dieser Untersuchungskampagne von einer Windböe getroffen, welche einen Teil der auf den Solarflächen des Rovers befindlichen Staubablagerungen wegwehte. Bedingt durch dieses auch als „Dust Cleaning Event“ bezeichnete Ereignis verbesserte sich die Energiesituation des ausschließlich mittels Solarenergie betriebenen Rovers deutlich. Vor dem „Dust Cleaning Event“ konnte Opportunity am 7. Juli 2010 lediglich eine moderate Menge von 359 Wattstunden an Energie generieren (0,359 kWh). Nach dem reinigenden Windstoß stieg dieser Wert zuerst auf über 400 Wattstunden pro Tag an und erhöhte sich schließlich bis zum 14. Juli auf 492 Wattstunden.
Am darauffolgenden Tag gelang Opportunity zum wiederholten Mal eine Premiere im Rahmen seiner überaus erfolgreichen Forschungstätigkeit auf dem Mars. Auf einer Aufnahme, welche die Panoramakamera des Rovers zur Festlegung der zukünftigen Fahrstrecke anfertige, war ein sogenannter „Dustdevil“ erkennbar. Dabei handelt es sich um eine Art Windhose oder Minitornado, welcher Staub und Sand in die Höhe wirbelt. Solche Dustdevils sind auf dem Mars eigentlich keine besonders ungewöhnlichen Erscheinungen. Speziell im Frühling und Sommer sind sie beziehungsweise die von ihnen auf der Oberfläche hinterlassenen Spuren immer wieder zu beobachten. Auf der anderen Seite des Mars gelangen Spirit, dem baugleichen Zwillingsrover von Opportunity, im Verlauf der letzten Jahre Dutzende von Aufnahmen solcher Windhosen.
Im Meridiani Planum, dem Operationsgebiet von Opportunity, konnte ein derartiges Phänomen im Verlauf der mittlerweile sechseinhalbjährigen Mission jedoch trotz intensiver Suche noch nie zuvor direkt beobachtet werden. Lediglich auf Aufnahmen, welche von den verschiedenen Marsorbitern erstellt wurden, waren von der Marsumlaufbahn aus deutlich die Spuren zu erkennen, welche die wirbelnden Luftmassen von Minitornados auf der Oberfläche des Meridiani Planum hinterlassen haben. Allerdings sind die Spuren im Meridiani Planum seltener zu entdecken als im Operationsgebiet von Spirit. Eventuell, so Dr. Mark Lemmon von der Texas A&M University, einer der Wissenschaftler der Mars Exploration Rover-Mission, liegt dies in der unterschiedlichen Struktur des Geländes begründet.
Minitornados bilden sich, bedingt durch Temperaturunterschiede in der Atmosphäre, sowohl im Gusev-Krater als auch im Meridiani Planum. Der Boden im Gusev-Krater, dem Landegebiet von Spirit, fällt dabei allerdings rauer und staubiger aus als die Oberfläche des Meridiani Planum. Die im Gusev-Krater auftretenden Luftwirbel können deshalb auch mehr Staub von der Oberfläche mit sich reißen. Die wirbelnden Luftströmungen über dem Meridiani Planum sind dagegen nur verhältnismäßig selten in der Lage auch genügend Sand mitzureißen, um dabei als Dustdevils in Erscheinung zu treten. Und wo nicht genügend loser Sand vorhanden ist, da können die Wirbel auch keine Spuren im Sand hinterlassen.

(Bild: NASA, JPL-Caltech, Cornell University, Texas A&M University)
Auffällig ist hierbei allerdings auch das zeitliche Zusammentreffen des erst wenige Tage zuvor erfolgten Cleaning Events, des anschließenden weiteren Anstiegs der Energieproduktion und letztlich der erstmaligen direkten Beobachtung eines Dustdevils im Meridiani Planum. „Hierbei könnte es sich um ein zufälliges Zusammentreffen der Ereignisse handeln, aber es könnte auch eine Verbindung existieren“, so Mark Lemmon. Anscheinend herrschten in der Umgebung von Opportunity über mehrere Tage hinweg anhaltende relativ starke Winde. „Diese Beobachtung war wirklich interessant. Sie bedeutet, dass die Atmosphäre aktiver ist, als wir bisher angenommen haben“, so Bill Nelson, der Chefingenieur der Rover-Mission. Als Reaktion auf die Beobachtung des Dustdevils begannen die für die Planung der Fotoaufnahmen zuständigen Wissenschaftler in den folgenden Tagen mit der systematischen Suche nach weiteren Windhosen. Bisher verlief diese Suche jedoch ergebnislos.
Bedingt durch die jetzt zur Verfügung stehende größere Energiemenge konnte der Rover am 12., 14. und 15. Juli jeweils etwa 70 weitere Meter fahren, ohne dabei die zuvor noch nötigen Pausen zwischen den einzelnen Etappen der Fahrt einzulegen. Diese Pausen waren in den letzten Monaten erforderlich, um die beiden Batterien des Rovers zwischen den einzelnen Fahrten während des Marswinters neu aufzuladen. Trotz der jetzt deutlich verbesserten Energiesituation wurde die Weiterfahrt des Rovers in den nächsten Tagen zuerst einmal unmöglich, da sich der als Kommunikationsrelais zwischen Opportunity und dem Deep Space Network (DSN) der NASA eingesetzte Orbiter Mars Odyssey in einen Sicherheitsmodus versetzt und sämtliche nicht unbedingt erforderlichen Aktivitäten eingestellt hatte (Raumfahrer.net berichtete). Die Fahrt vom 15. Juli konnte nur deshalb ausgeführt werden, weil die entsprechenden Kommandosequenzen zufälligerweise noch unmittelbar vor dem Beginn des Sicherheitsmodus an den Rover übermittelt wurden.
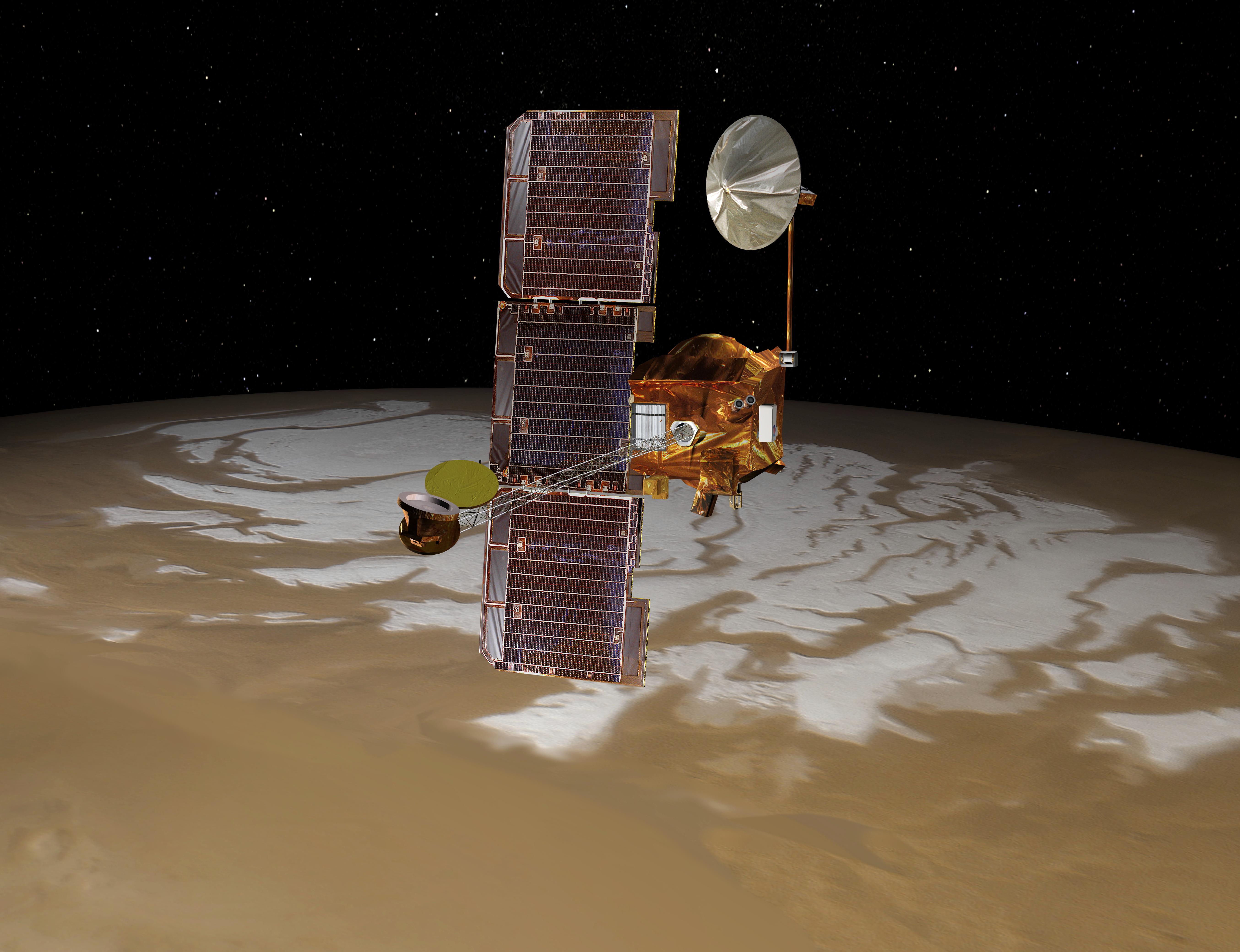
Aufgrund des zeitweiligen Ausfalls seiner Relaisstation war Opportunity in der Folgezeit darauf angewiesen, die tägliche Kommunikation mit seinem in Pasadena/USA befindlichen Kontrollzentrum zum größten Teil ohne die Unterstützung einer Funkrelaisstation ausschließlich auf direktem Weg durchzuführen. Der zweite Marsorbiter der NASA, der Mars Reconnaissance Orbiter (MRO), wurde nur kurzfristig als Ersatz für Mars Odyssey eingesetzt. Allerdings wird die zu übertragende Datenmenge bei einer ausschließlichen Direktkommunikation zwischen dem Rover und dem DSN um mehr als das zehnfache reduziert.
Dies hatte zur Folge, dass auch die täglichen Aktivitäten des Rovers vorerst eingeschränkt werden mussten. Die einzigen Daten, welche Opportunity in diesem Zeitraum an sein Kontrollzentrum übermittelte, waren die grundlegendsten Telemetriedaten, welche sich auf den allgemeinen Zustand des Rovers bezogen. Eine Weiterfahrt in Richtung auf den Endeavour-Krater war aus diesem Grund in diesem Zeitraum nicht möglich.
Am 23. Juli wurde der Sicherheitsmodus von Mars Odyssey beendet und der Orbiter nahm seinen normalen Betrieb wieder auf. Am selben Tag führte Opportunity mit dem APXS-Spektrometer erneute Messungen zur Untersuchung des in der Atmosphäre enthaltenen Edelgases Argon durch. Nach Kohlendioxid (95,3 Prozent) und Stickstoff (2,7 Prozent) ist Argon mit einem Anteil von 1,6 Prozent das dritthäufigste Gas innerhalb der Marsatmosphäre. Die nächste Fahrt erfolgte am 25. Juli, dem Sol 2311 der Mission, wobei der Rover sich um 28 Meter in die ost-südöstliche Richtung bewegte.
Bei dieser Fahrt wurde auch erstmals eine neue Fortbewegungsweise erprobt, welche von Scott Maxwell, einem der für die Steuerung von Opportunity verantwortlichen Roverdriver des Jet Propulsion Laboratorys (JPL) in Pasadena/Kalifornien, entwickelt wurde. Sollte die neue Fahrweise erfolgreich sein, so die Erwartung der Roverdriver, könnte damit die tägliche Fahrleistung des Rovers um bis zu 30 Prozent gesteigert werden, wodurch sich auch die Zeit bis zum Erreichen des Endeavour-Kraters um mehrere Monate verkürzen würde.
(Bild: NASA, JPL-Caltech, Cornell University, 3D-Ansicht erstellt durch Stuart Atkinson)
In den vergangenen Jahren konnte Opportunity problemlos Fahrten über mehr als 100 Meter absolvieren, aber lediglich die ersten etwa 70 Meter einer solchen Etappe werden dabei im Vorfeld der Fahrt detailliert von den Roverdrivern festgelegt. Zur Planung dieses ersten Teilbereichs der Route verwendet man dabei die Bilder der Panorama- und Navigationskameras des Rovers, welche die zukünftige Fahrtrichtung abbilden und mindestens einen Tag vor dem Beginn der Fahrt angefertigt und an das Kontrollzentrum übermittelt werden.
Aus diesen Aufnahmen, alle Kameras des Rovers verfügen über eine rechte und eine linke Optik, werden durch die Überlagerung der zeitgleich durch beide Optiken angefertigten Fotos anschließend unter anderem Stereobilder erzeugt, auf denen das zu passierende Gelände in seiner räumlichen Ausdehnung mitsamt der vorhandenen Höhenunterschiede und Hindernisse deutlich erkennbar ist. Außerdem werden dreidimensionale Geländemodelle, sogenannte DTMs, errechnet, auf denen zum Beispiel der Neigungswinkel der zu passierenden Sanddünen erkennbar ist. Erst mit Hilfe dieser Modelle wird dann von den Roverdrivern die exakte Fahrtroute festgelegt.
Die entsprechenden Fahrkommandos werden dann an den Rover übermittelt, welcher die vorgegebene Strecke in einem sogenannten „Blind Drive“-Modus abfährt. Die Fahrt wird dabei jeweils nach wenigen Metern kurz unterbrochen. Opportunity fertigt während dieser Unterbrechungen mit seinen Kamerasystemen, speziell mit den an der Vorder- und Hinterseite des Rovers angebrachten Gefahrenerkennungskameras, den sogenannten HazCams, Kontrollaufnahmen an, um eventuelle vorher noch nicht sichtbare Hindernisse zu erkennen und diesen auszuweichen.
Nach der Beendigung dieser „Blind“-Fahrt wechselt der Rover in den sogenannten Autonavigationsmodus und bestimmt den weiteren Kurs zu einem vorgegebenen Zielpunkt der Tagesetappe ab jetzt selbstständig. Dazu erstellt der Rover etwa alle zwei Meter Aufnahmen mit seinen Kameras, welche das vorausliegende Gelände abbilden. Eine spezielle Software wertet die Aufnahmen umgehend aus und berechnet den für Opportunity am sichersten erscheinenden Weg in Richtung auf das jeweilige Tagesziel.

(Bild: Max-Planck-Institut für Chemie, Daniel Maas)
Ab dem Februar 2009 zeigten die Telemetriedaten des Rovers einen erhöhten Reibungswiederstand des rechten Vorderrades von Opportunity und daraus resultierend einen erhöhten Stromverbrauch dieses Rades an. Als Ursache hierfür wird ein Problem mit dem Schmiermittel des betreffenden Radgetriebes angenommen. Anschließende Analysen ergaben, dass der Stromverbrauch des rechten Vorderrades bei einer Rückwärtsbewegung des Rovers geringer ausfällt als bei einer Vorwärtsbewegung. Um das Rad und das für dessen Antrieb verantwortliche Getriebe so weit wie möglich zu schonen, wurde Opportunity ab jetzt nur noch im „Rückwärtsgang“ über das Meridiani Planum gesteuert.
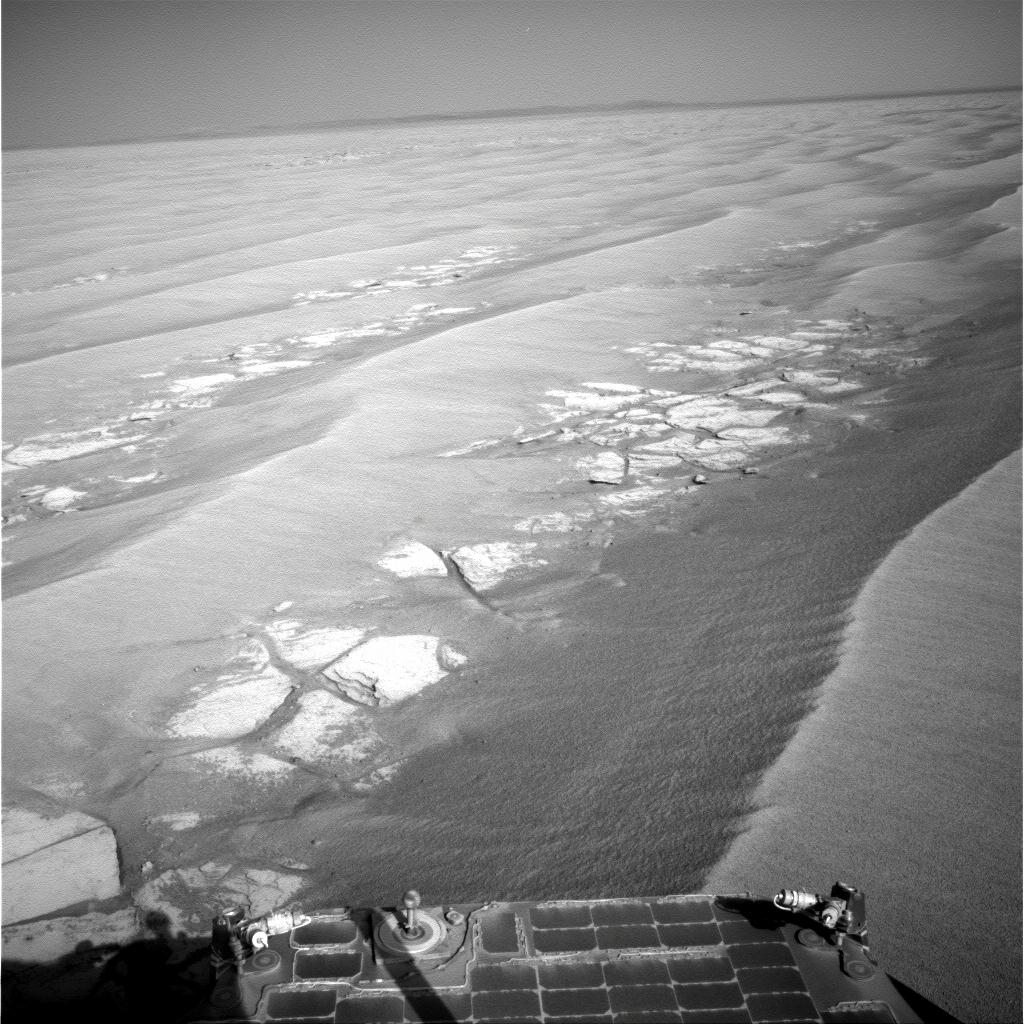
Bei der Rückwärtsbewegung des Rovers ergibt sich allerdings das Problem, dass Opportunity dabei nach einer Fahrt im „Blind Drive“-Modus nicht in den Autonavigationsmodus überwechseln kann. Für diesen „Autonav“-Modus benötigen der Rover zwingend die aktuellen Bilder seiner beiden Navigationskameras. Diese Kameras können das umliegende Gelände zwar in einem Winkel von 360 Grad abbilden, bei einem Blick in die rückwärtige Richtung behindert jedoch der direkt hinter den Kameras positionierte Mast der Niedriggewinnantenne (LGA-Antenne), welche neben der leistungsstärkeren HGA-Antenne für die Direktkommunikation mit dem Kontrollzentrum genutzt wird, die freie Sicht auf die Oberfläche unmittelbar vor dem Rover.

(Bild: NASA, JPL-Caltech, Cornell University)
Da sich bei den in die rückwärtige Richtung zielenden Aufnahmen auch dieser Antennenmast im abgebildeten Bereich befindet und dabei einen Teil des zukünftig zu passierenden Geländes verdeckt, können aus diesen Aufnahmen keine aussagekräftigen Stereobilder erzeugt werden. Aus diesem Grund können die Aufnahmen nicht zur Erstellung einer sicheren Route im Autonavigationsmodus genutzt werden.
Die in die rückwärtige Richtung zeigenden Gefahrenerkennungskameras können ebenfalls dreidimensionale Bilder erzeugen, welche durch die Software des Rovers verarbeitet werden. Allerdings können diese Kameras das vorausliegende Gelände nur bis zu einer Entfernung von etwa drei Metern in einer brauchbaren Auflösung wiedergeben, was für eine erfolgreiche Planung der Weiterfahrt eine zu geringe Reichweite darstellt.
Bedingt durch dieses Problem waren die Fahrten der letzten Monate, welche ausschließlich in der Rückwärtsbewegung erfolgten, auf eine Distanz von maximal rund 70 Metern limitiert, welche dabei ausschließlich im „Blind Drive“-Modus erfolgten. Durch die neue Vorgehensweise hoffen die Roverdriver jedoch, die Fahrten in Zukunft durch eine erneute Aufnahme der Autonavigationsfahrten noch weiter ausdehnen zu können.
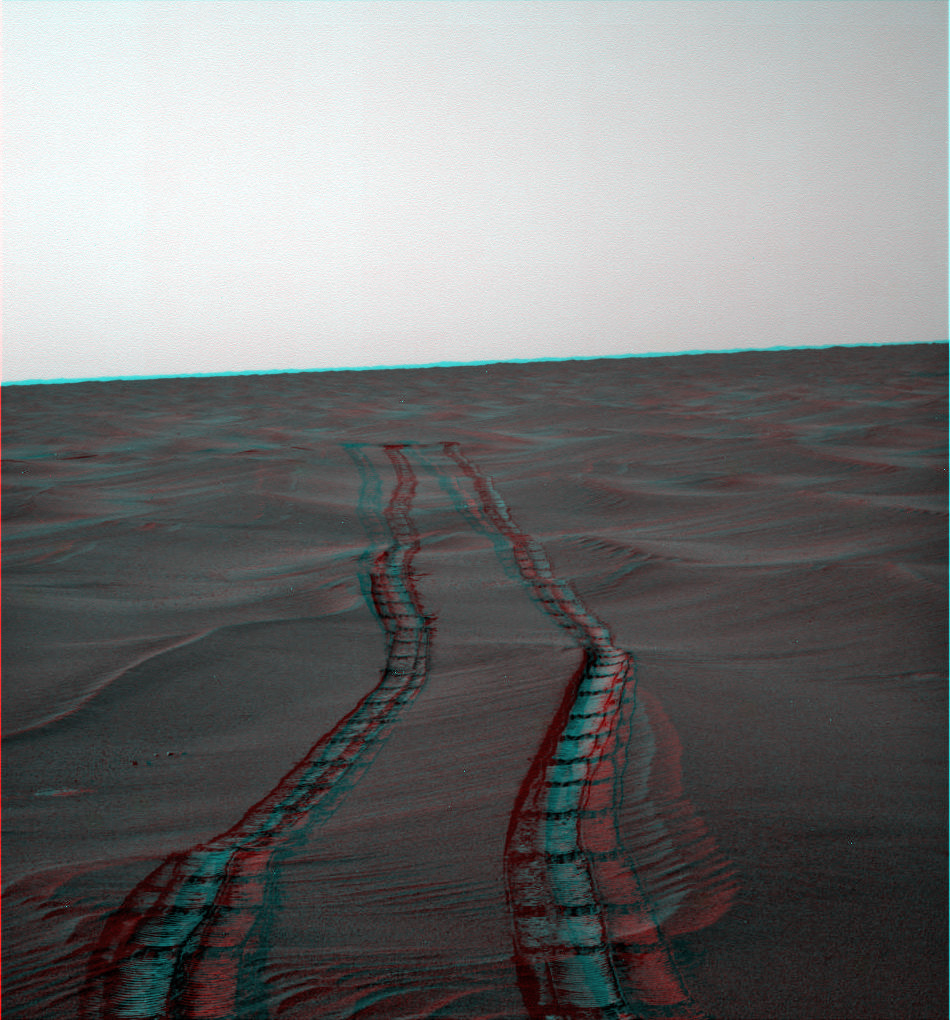
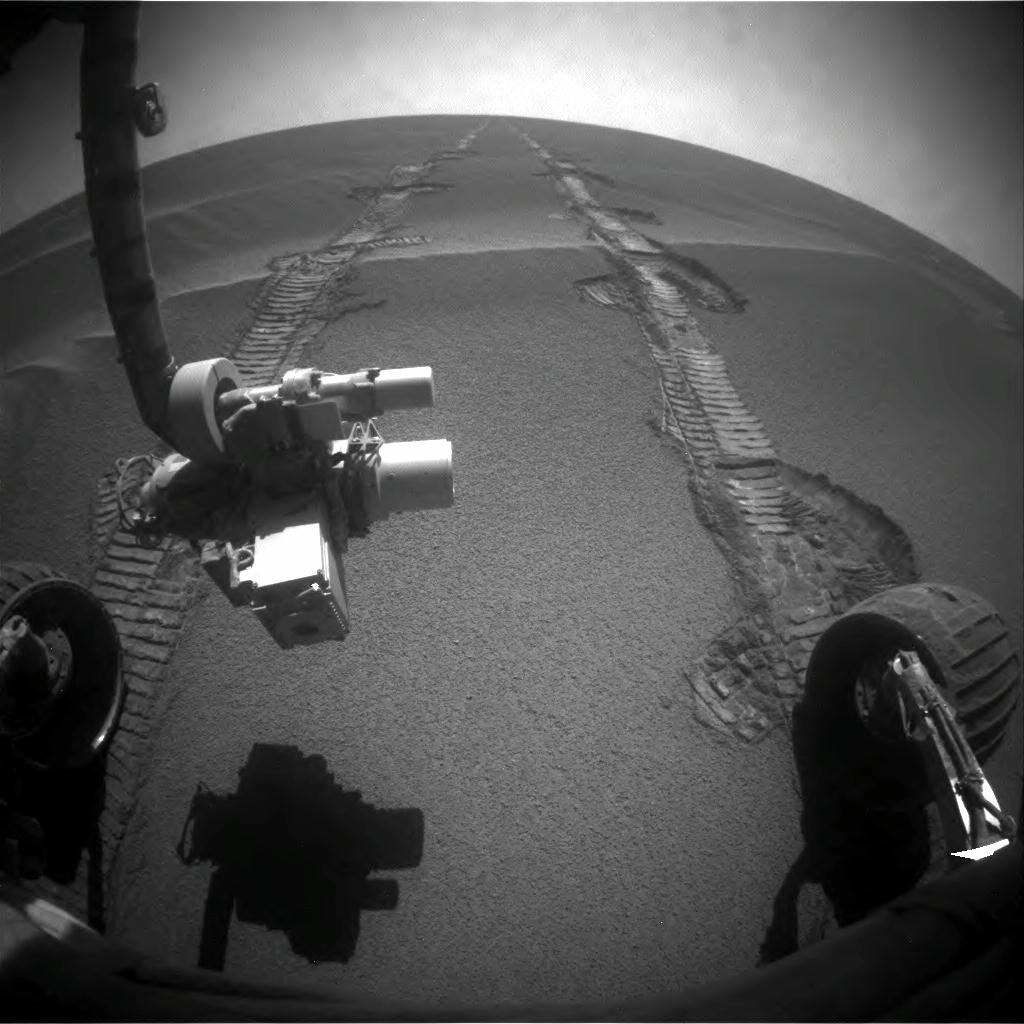
Zuerst soll dabei wie bisher im „Rückwärtsgang“ eine reguläre Distanz von etwa 70 Metern im „Blind Drive“-Modus überbrückt werden. Anschließend soll die Navigationskamera in ihrer horizontalen Ausrichtung um 162,5 Grad geschwenkt werden. Die Kamera kommt dabei an einem Punkt zum Stehen, welcher den Mast der LGA-Antenne noch nicht im Blickfeld hat. Anschließend wird sich der gesamte Rover um weitere 17,5 Grad drehen, was zur Folge hat, dass die Navigationskamera jetzt genau in die vorgesehene Fahrtrichtung zeigt, ohne dass deren Sichtfeld durch den Antennenmast verdeckt ist. Nach der Aufnahme der erforderlichen Navigationsfotos dreht sich Opportunity wieder um 17,5 Grad zurück in die Fahrtrichtung.
(Bild: NASA, JPL-Caltech, Cornell University)
Nach dem Abschluss der Berechnungen der Navigationssoftware setzt der Rover seine Fahrt fort. In zwei getrennten Schritten wird Opportunity sich dabei um einen Meter nach vorne bewegen, bevor die Prozedur wiederholt wird. Abhängig von der Schwierigkeit des zu passierenden Geländes und den zur Verfügung stehenden Energiereserven kann die während einer einzelnen Fahrt zu überbrückende Strecke auf diese Weise eventuell um bis zu 30 Prozent gesteigert werden.
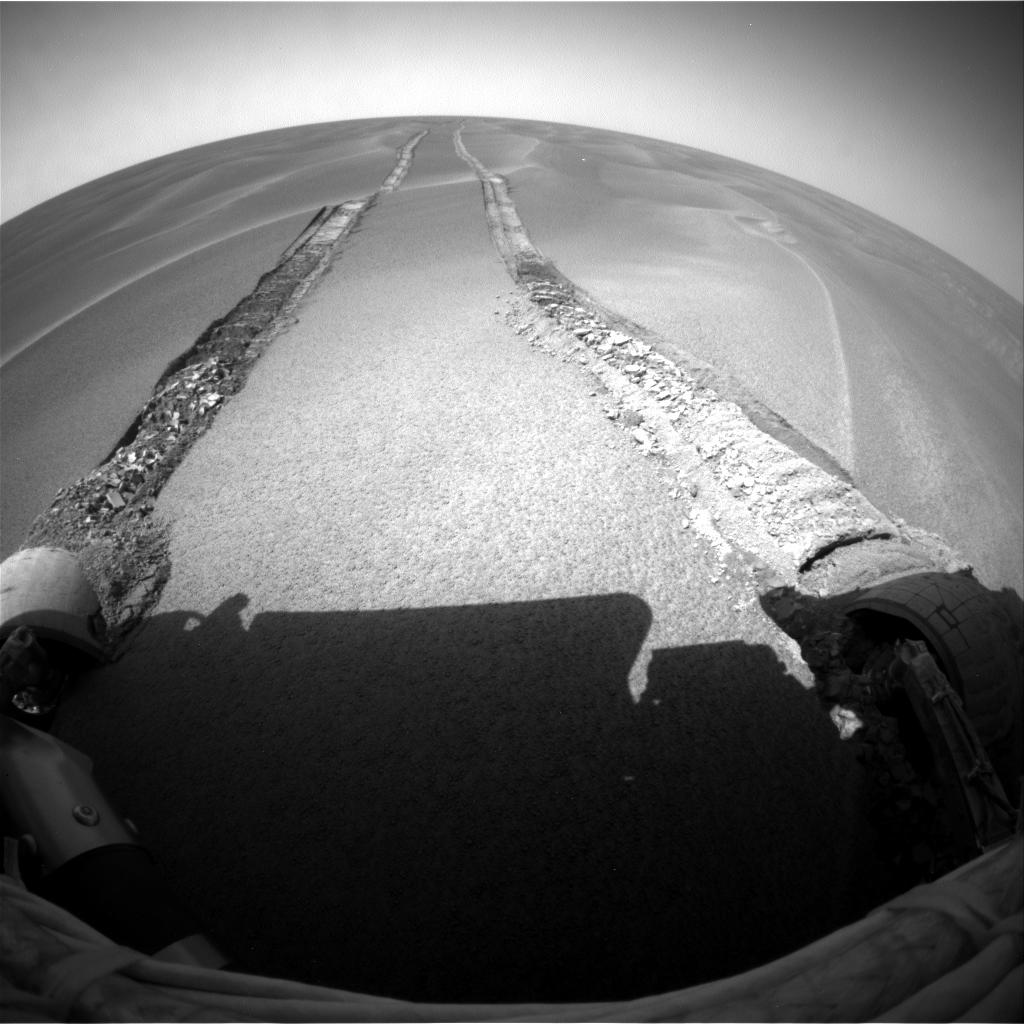
Das nebenstehende und das obrige Bild sollen die geplante Prozedur lediglich verdeutlichen. Beide Aufnahmen wurden zeitgleich erstellt und geben den Geländeabschnitt ohne eine zwischenzeitlich erfolgte Drehung des Rovers wieder. Die unterschiedliche Abbildung des Antennenmastes ist durch die räumlich versetzte Anordnung der beiden Optiken der Navigationskamera bedingt.
Was sich hier wie eine eigentlich naheliegende Idee liest, gestaltet sich in der Praxis allerdings doch bedeutend komplizierter. Zum einen sind sowohl die in sehr kurzen Abständen erfolgenden Zwischenstopps als auch die dabei durchzuführenden Drehungen des Rovers relativ zeit- und energieintensiv. Zum anderen ist dabei zu berücksichtigen, dass sowohl der für die Drehbewegung der Navigationskamera zuständige Aktuator als auch die für die Lenkung des Rovers zuständigen Steuerungsmotoren bei diesen Manövern einer erheblichen Mehrbelastung ausgesetzt sein werden. Erst die Zukunft wird zeigen, ob die einzelnen Bauteile des Rovers, welche ihre jeweilige vorgesehene Einsatzzeit mittlerweile weit überschritten haben, diesen Belastungen gewachsen sind.
Der am 25. Juli erfolgte erste Test der neuen Methode verlief nach der Meinung der Roverdriver befriedigend. Trotzdem legte Opportunity bei seiner nächsten Fahrt am 29. Juli erst einmal lediglich eine Distanz von 16 Metern zurück und begab sich dabei erneut zu einer Stelle mit offen zutage liegenden Grundgestein. Auch bei dieser als „Valparaiso“ bezeichneten Formation wurden über das Wochenende ausführliche Untersuchungen durchgeführt. Nachdem die Panoramakamera das zu untersuchende Gebiet abgebildet hatte, wurden dazu erneut zuerst das Mikroskop und anschließend das APXS-Spektrometer unmittelbar über der Oberfläche platziert.
Derartige Untersuchungen werden auch in Zukunft weiterhin in regelmäßigen Abständen erfolgen. Die Wissenschaftler wollen auf diese Weise eventuelle Veränderungen in der Zusammensetzung der Oberfläche im Bereich zwischen dem Viktoria-Krater und dem Endeavour-Krater dokumentieren. Die Fahrt wurde am 4. August, dem Sol 2320 der Mission, mit einer weiteren ausschließlich im „Blind Drive“-Modus durchgeführten Etappe über 71 Meter in die südöstliche Richtung fortgesetzt.
(Bild: NASA, JPL, Cornell University)
Die nächste Fahrt erfolgte zwei Tage später. Da die Kalkulationen der Techniker und Ingenieure ergaben, dass dem Rover genügend Energie für eine etwa dreistündige Fahrt zur Verfügung stand, wurde diese Fahrt dazu genutzt, um die neue Strategie der Fortbewegung erstmals im vollen Umfang zu testen. Sollte dabei alles wie vorgesehen funktionieren, so Scott Maxwell, könnte man bei dieser Etappe unter Umständen eventuell eine Distanz von bis zu 100 Metern zurücklegen. Real wurden während dieser Fahrt dann allerdings „lediglich“ etwa 78 Meter überbrückt, wobei der Rover die Fahrt nach etwa 90 Minuten selbstständig abbrach.
Im Verlauf der Fahrt überwand Opportunity an diesem Sol 2322 der Mission die Marke von 22 auf der Oberfläche des Mars zurückgelegten Kilometern. Für einen Rover, welcher daraus ausgelegt war, im Verlauf von prognostizierten 90 Sols etwa 700 Meter auf der Oberfläche des Mars zurückzulegen, stellt dies wohl wahrlich eine beeindruckende Leistung dar.
Die Navigationssoftware des Rovers, so die anschließenden Analysen am JPL, kam während der „erweiterten Fahrt“ zu dem Ergebnis, dass der gewählte Weg eventuell nicht sicher genug sei, weshalb die Weiterfahrt im Autonavigationsmodus von dem Rover vorsorglich vorzeitig abgebrochen wurde. Trotzdem erreichte man bei dieser Fahrt eine Steigerung der zurückgelegten Strecke um etwa 10 Prozent. Dies, so die Beurteilung von Scott Maxwell, ist als ein positives Ergebnis für diesen ersten wirklichen Test der neuen Fahrweise zu bewerten. Es wurde ein über die normale Fahrt hinausgehender zusätzlicher Geländegewinn erzielt und die Software des Rovers hat dabei auf eine mögliche Gefahr wie vorgesehen reagiert.
Die Fahrtechnik mit einer autonomen Fahrt im Anschluss an eine vorgegebene 70-Meter-Fahrt wurde bisher noch nie in der Praxis erprobt. Von daher ist es verständlich, dass die Roverdriver die Sicherheitsparameter in dieser ersten Phase der Tests erst einmal eher vorsichtig einstellen, was dann auch frühzeitige Abbrüche der Fahrten nach sich ziehen kann. Sobald man mehr Erfahrung damit gesammelt hat, wie Opportunity bei diesen Autonavigationsfahrten auf bestimmte Situationen reagiert, können diese Parameter gelockert werden, was sich dann auch positiv auf die jeweils zurückgelegten Entfernungen auswirken wird.
Zusätzlich wird sich das Gelände in Zukunft zugunsten des Rovers verändern, je weiter Opportunity sich in Richtung Osten bewegt. Die Höhe der zu überquerenden Sanddünen wird in diese Fahrtrichtung bei einem leicht abschüssigen Gelände immer geringer ausfallen, was das Vorankommen des Rovers erleichtern wird. Unter anderem wird sich dabei auch der Blickwinkel der Kameras auf das zukünftig zu passierende Gelände verbessern, da die niedrigeren Dünen ein besseres Sichtfeld auf die zu überquerenden Geländebereiche erlauben.
(Bild: NASA, JPL-Caltech)
„Wir haben den Bereich mit den gefährlichen Purgatory-Dünen (hierbei handelt es sich um relativ hoch ausfallende Dünen mit einer sehr lockeren Zusammensetzung) hinter uns gelassen und die Zukunft sieht sehr gut aus“, so Ray Arvidson, der stellvertretende Rover-Projektleiter von der Washington University in St. Louis/USA. „Die Dünen werden jetzt immer flacher und dabei leichter zu überqueren und das Fahren wird damit immer einfacher.“ Trotzdem wird man auf dem weiteren Weg zum Endeavour-Krater auch immer wieder Geländeabschnitte passieren müssen, wo Opportunity mit etwas höher ausfallenden Dünen konfrontiert wird oder wo diese Dünen sich aus einem etwas lockereren Untergrund als gewöhnlich zusammensetzen. Das bei der Überquerung dieser Geländeabschnitte auftretende „Durchdrehen“ der Räder wird dann wohl auch mehrfach zu frühzeitigen Fahrtabbrüchen beziehungsweise zu von vornherein kürzer angesetzten Tagesetappen führen.
Unabhängig von dem zu überquerenden Gelände hofft das Team der Mars Exploration Rover-Mission auf weitere Cleaning Events, welche die Energieproduktion des Rovers noch weiter steigern dürften. Neben dem Umstand, dass damit auch noch mehr Energie für zukünftige Fahrten zur Verfügung stehen würde, könnte davon auch eines der Instrumente des Rovers, das Mini-TES-Spektrometer, profitieren. Im Verlauf eine Staubsturmes hat sich im Jahr 2007 Staub auf einem der Spiegel dieses Instrumentes abgelagert und seitdem liefern die Messungen dieses Spektrometers keine brauchbaren wissenschaftlichen Daten. Im letzten Jahr wurde die Optik des Mini-TES-Spektrometers deshalb in regelmäßigen Abständen „in den Wind gedreht“. Die Hoffnung, dass der Staub dabei wieder von der Optik weggeweht werden könnte, hat sich bisher leider nicht erfüllt.
Ein Problem mit diesem Instrument war am 30. Mai 2010 dafür verantwortlich, dass der für die Azimut-Ausrichtung der Panoramakameras zuständige Aktuator nicht wie vorgesehen reagierte (lesen Sie hierzu auch den letzten Statusbericht). „Die dafür verantwortliche Fehlerquelle wird nach wie vor von uns gesucht und konnte bisher noch nicht identifiziert werden. Wir untersuchen derzeit, ob das Problem direkt in dem Mini-TES-Spektrometer zu suchen ist oder ob es sich in den Schnittstellen mit dem Rover befindet“, so Amy Knudson von der Arizona State University (ASU), welche für den Einsatz des Instruments bei Opportunity verantwortlich ist. „Zusätzlich versuchen wir festzustellen, ob es möglich ist, das Mini-TES wieder einzuschalten und erneut zu testen, ohne dabei Opportunity zu gefährden. Kurz gesagt ist diese Untersuchung mittlerweile bereits fortfahren, aber die Zukunft des Mini-TES bleibt trotzdem zunächst einmal ungewiss. Unabhängig davon werden wir den Spiegel des Spektrometers auch weiterhin regelmäßig öffnen und hoffen dabei, das der auf der Optik befindliche Staub weggeblasen wird.“
Opportunity setzte seine Fahrt am 8. August, dem Sol 2324 der Mission, fort und bewegte sich weitere 75 Meter in die südöstliche Richtung. Die nächste Fahrt erfolgte zwei Tage später. Im Anschluss an eine Fahrt über 74 Meter im „Blind Drive“-Modus konnte der Rover dabei erfolgreich weitere 12 Meter im Autonavigationsmodus zurücklegen. Die nächste Fahrt erfolgte bereits am darauffolgenden Tag. Im Anschluss an eine vorgegebene Fahrt über diesmal lediglich rund 35 Meter legte der Rover weitere sieben Meter ohne die Kontrolle der Roverdriver zurück.
Als nächsten Schritt wollen die Roverdriver des JPL analysieren, warum Opportunity seine bisherigen Fahrten im Autonavigationsmodus bisher früher beendet als erwartet. Erste Auswertungen der Telemetriedaten deuten dabei darauf hin, dass die erstellten Navigationsbilder in deren Randbereichen zu unscharf dargestellt werden. Durch eine geänderte Einstellung der Sicherheitsparameter kann die daraus resultierende vorzeitige Beendigung der Fahrten in Zukunft allerdings eventuell umgangen werden. Außerdem ist unter Umständen eine neue Kalibrierung der Kameras möglich, wodurch diese Abbildungsfehler eliminiert werden könnten. Bis dahin nimmt man die Situation am JPL so, wie sie sich gegenwärtig darstellt. Jeder zusätzlich zurückgelegte Meter stellt einen definitiven Gewinn für Opportunity dar und verkürzt dabei die Reisezeit bis zum Endeavour-Krater.
Trotz der Analysen setzte der Rover seine Fahrt fort und kam dabei in den folgenden Tagen gut voran. Die nächste Fahrt wurde bereits am 12. August, dem Sol 2328 der Mission, durchgeführt. In einer ausschließlichen „Blind Drive“-Fahrt wurden dabei weitere 70 Meter in die östliche Richtung überbrückt. Am 13. August führte die Fahrt erneut über 70 Meter, wobei Opportunity sich diesmal nach Südosten bewegte. Die anschließende Fahrt vom heutigen 14. August, dem gerade beendeten Sol 2330 der Mission, deutet darauf hin, dass die Roverdriver das Problem mit den relativ kurzen Autonavigationsfahrten in den Griff zu bekommen scheinen. Diese bisher letzte Fahrt führte wieder in die östliche Richtung, wobei der Rover weitere 95 Meter zurücklegen konnte.

(Bild: NASA, JPL-Caltech, University of Arizona, Bildbearbeitung: Stuart Atkinson)
Auch in den nächsten Wochen und Monaten wird der Rover sich weiterhin in die östliche Richtung bewegen und dabei seinem nächsten „großen Ziel“, dem Endeavour-Krater, nähern. Als Ankunftspunkt an diesem Krater ist dabei nach wie vor das Cape York vorgesehen. Hierbei handelt es sich um eine etwa 650 Meter lange und rund 150 Meter breite Geländeerhebung am Westrand des Endeavour-Kraters. Diese Geländeformation ist dabei von geschichteten Gesteinsablagerungen umgeben, welche aufgrund der durch Spektrometermessungen aus der Umlaufbahn erzielten Messergebnisse unter dem Einfluss von Wasser entstanden sind.
Cape York befindet sich etwa 300 Meter vom eigentlichen Kraterrand entfernt. Dieser wiederum, so die bisherigen Analysen aus den Daten der Orbiter, scheint Tonminerale zu enthalten, was auf eine früher erfolgte Interaktion mit Wasser hindeutet. Nach der Untersuchung von Cape York soll deshalb unmittelbar der eigentliche Kraterrand angesteuert werden. Um dieses Ziel auch zu erreichen gibt es vorläufig nur eine Vorgabe für den Rover: „Fahren, fahren, fahren…“, so Steve Squyres von der Cornell University.
Unterbrochen werden soll diese Fahrt, soweit es keine weiteren technischen Probleme mit dem als Kommunikationsrelais eingesetzten Orbiter Mars Odyssey oder mit Opportunity selbst gibt, lediglich durch gelegentliche und dann auch nur kurzzeitige wissenschaftliche Untersuchungen. „Im weiteren Verlauf der noch 11 Kilometer andauernden Fahrt werden wir auch weiterhin diverse Untersuchungen der Gesteinszusammensetzungen und auch ein oder zwei Untersuchungen der Bodenzusammensetzung durchführen“, so Ray Arvidson.
Neben dem technischen Zustand des Rovers muss bei den weiteren Fahrten auch immer der Energiehaushalt von Opportunity im Auge behalten werden. Da der Rover ausschließlich mittels seiner Solarpaneele durch Sonnenenergie betrieben wird, ist für dessen Energiesituation ausschließlich das Wetter auf dem Mars verantwortlich. Dieses hat sich auf unserem Nachbarplaneten auch in den vergangenen Wochen typisch für einen Sommer auf der nördlichen Mars-Hemisphäre entwickelt und zumindestens in dieser Hinsicht steht einer Fortsetzung der Forschungsreise von Opportunity gegenwärtig nichts im Weg.
Die fortschreitende Sublimation von Wassereis im Bereich der verbliebenen nördlichen Polarkappe führte global zu einem erhöhten Wasserdampfgehalt innerhalb der Marsatmosphäre, welcher wiederum eine verstärkte Bildung von Wassereiswolken in den äquatorialen Regionen zur Folge hatte. Dichtere Wolken aus Wassereiskristallen wurden dabei in den letzten Wochen speziell über den Vulkanen der Tharsis-Region, hierbei besonders über den Tharsis Montes, Olympus Mons und Alba Patera, der Elysium-Region und im Bereich des Valles Marineris beobachtet. Kurzlebige und lokal begrenzte Staubstürme wurden in den Randbereichen der nördlichen Polarkappe, im Hellas-Impaktbassin und nordwestlich des Argyre Planitia beobachtet. Der Himmel über dem Gusev-Krater, dem Operationsgebieten des Rovers Spirit, erschien während der letzten Woche frei von Wolken und Staub, während der Himmel über Opportunitys Einsatzgebiet von vereinzelten Wolken aus Wassereis durchsetzt war.
Einen Überblick über die Entwicklung der Energiewerte von Opportunity während der letzten Wochen gibt die folgende Auflistung. Der Tau-Wert steht dabei für die Durchsetzung der Marsatmosphäre mit Staub und Eiskristallen. Je mehr Staub sich in der Atmosphäre des Planeten befindet, desto höher fällt dieser Wert aus. Der Wert für die Lichtdurchlässigkeit der Solarzellen gibt dagegen an, wie viel Sonnenlicht die Solarpaneele trotz einer bedeckenden Staubschicht erreicht und letztendlich zur Energiegewinnung genutzt werden kann. Je niedriger der Tau-Wert und je höher der Faktor für die Lichtdurchlässigkeit ausfällt, desto besser für den Energiehaushalt des Rovers. Der für den 27. Juli dokumentierte stark erhöhte Tau-Wert resultiert in erster Linie aus einer in der Vorwoche erfolgten Rekalibrierung der Tau-Messungen.
- 02.06.2010: 0,269 kWh/Tag , Tau-Wert 0,465 , Lichtdurchlässigkeit 56,60 Prozent
- 09.06.2010: 0,287 kWh/Tag , Tau-Wert 0,371 , Lichtdurchlässigkeit 58,90 Prozent
- 15.06.2010: 0,297 kWh/Tag , Tau-Wert 0,280 , Lichtdurchlässigkeit 57,00 Prozent
- 22.06.2010: 0,320 kWh/Tag , Tau-Wert 0,257 , Lichtdurchlässigkeit 55,85 Prozent
- 29.06.2010: 0,354 kWh/Tag , Tau-Wert 0,295 , Lichtdurchlässigkeit 57,70 Prozent
- 07.07.2010: 0,359 kWh/Tag , Tau-Wert 0,226 , Lichtdurchlässigkeit 57,70 Prozent
- 14.07.2010: 0,492 kWh/Tag , Tau-Wert 0,223 , Lichtdurchlässigkeit 70,00 Prozent
- 27.07.2010: 0,533 kWh/Tag , Tau-Wert 0,558 , Lichtdurchlässigkeit 79,50 Prozent
- 03.08.2010: 0,529 kWh/Tag , Tau-Wert 0,415 , Lichtdurchlässigkeit 74,40 Prozent
Bis zum 3. August 2010, dem Sol 2320 der Mission, konnte Opportunity insgesamt 21.948,13 Meter auf der Oberfläche unseres Nachbarplaneten zurücklegen. Im Verlauf der bis zum heutigen Tag erfolgten sieben weiteren Fahrten konnte der Rover etwa 500 weitere Meter zurücklegen. Bis zum Erreichen des Randes des Endeavour-Kraters muss der Robotergeologe jedoch noch weitere über zehn Kilometer überwinden.
Verwandte Artikel:
Verwandte Seite:
Raumcon-Forum: