Der Mars Reconnaissance Orbiter wird im Laufe der Woche für etwa zwei Tage in einen Sicherheitsmodus übertreten und seine Arbeit in diesem Zeitraum einstellen. Der Grund hierfür ist ein notwendiges Umschalten auf ein redundantes Trägheitsnavigationssystem, mit dem der Orbiter seine Orientierung im All ermittelt.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL. Vertont von Peter Rittinger.
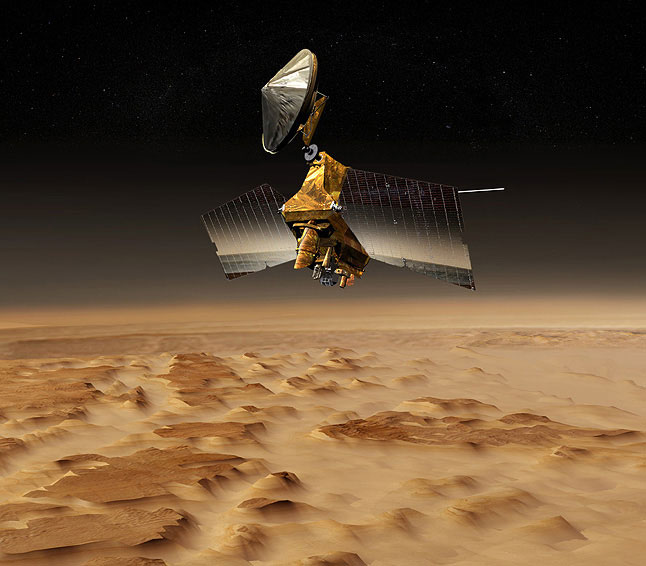
Bereits seit dem März 2006 umkreist die von der US-amerikanischen Weltraumbehörde NASA betriebene Raumsonde Mars Reconnaissance Orbiter (MRO) unseren äußeren Nachbarplaneten auf einer fast polaren, sonnensynchron verlaufenden Umlaufbahn in einem etwa 255 x 320 Kilometer hohen Orbit und liefert den an dieser Mission beteiligten Wissenschaftlern mittels der sechs an Bord dieses Marsorbiters mitgeführten Instrumente fast täglich neue Daten über den Mars.
Für seine Lagekontrolle im Marsorbit ist der MRO mit zwei identischen Inertial Measurement Units (kurz „IMU“) ausgestattet. Jedes dieser beiden Trägheitsnavigationssysteme besteht aus jeweils drei Gyroskopen und drei Beschleunigungsmessern. Dabei wird je ein Gyroskop und ein Beschleunigungsmesser pro Bewegungsachse verwendet. Die Gyroskope werden zur Ermittlung der Rotationsgeschwindigkeit der Raumsonde eingesetzt. Die Beschleunigungsmesser dienen dagegen für die Messung der Beschleunigung, welche zum Beispiel bei der Zündung von Lagekontrolltriebwerken auftritt.
Durch die so gewonnenen Daten kann die Flugsoftware des Orbiters punktgenau ermitteln, an welcher Stelle und mit welcher Orientierung zur Marsoberfläche sich der MRO gerade befindet. Eine exakte Bestimmung dieser Orientierung im Raum ist für einen erfolgreichen Einsatz des Orbiters allerdings zwingend notwendig, da nur mit diesen Informationen sowohl die wissenschaftlichen Instrumente als auch die für die Kommunikation mit dem Kontrollzentrum benötigten Antennen mit der erforderlichen Präzision auf den Mars beziehungsweise auf die Erde ausgerichtet werden können.
(Bild: NASA, JPL-Caltech)
Nach einem mittlerweile mehr als siebenjährigen, nahezu ununterbrochenen Einsatz im Marsorbit zeigt eines der Gyroskope des bisher hauptsächlich eingesetzten Trägheitsnavigationssystems, der IMU-1, inzwischen deutliche Anzeichen einer „Altersschwäche“. Um einem Ausfall der IMU-1 vorzubeugen, werden die für die Steuerung des Marsorbiters verantwortlichen Ingenieure des Jet Propulsion Laboratory (JPL) der NASA deshalb in den nächsten Tagen einen Wechsel auf das redundante, bisher nur gelegentlich eingesetzte Reserveträgheitsnavigationssystem IMU-2 durchführen.
Während des Wechsels wird der Orbiter sein Arbeitsprogramm kurzzeitig unterbrechen. Nach einer Deaktivierung der wissenschaftlichen Instrumente und einer Ausrichtung der für die Energieversorgung benötigten Solarpaneele auf die Sonne erfolgt die Umschaltung auf das redundante System. Bedingt durch die Umschaltung wird sich der MRO zunächst in einen sogenannten Sicherheitsmodus versetzen. Aus diesem Sicherheitsmodus heraus reinitialisiert er dann die neu zu aktivierende IMU-2 und „versorgt“ sich dabei zunächst mit neuen Daten über die aktuell gegebene Ausrichtung im Raum. Nach dem Erhalt und der Verarbeitung dieser Daten wird der Orbiter den Sicherheitsmodus beenden und nach einer eingehenden Überprüfung des Erfolges der Operation mit seinen Aktivitäten fortfahren.
Aller Voraussicht nach, so die hierfür verantwortlichen Mitarbeiter des JPL, wird die gesamte Prozedur zwischen dem Beginn und der Beendigung des Safe-Mode einen Zeitraum von weniger als 48 Stunden benötigen.
Die bereits jetzt erfolgende Umschaltung auf die bisher kaum zum Einsatz gebrachte IMU-2 hat zur Folge, dass die derzeit immer noch voll einsatzfähige IMU-1 trotz des dort befindlichen auffällig gewordenen Gyroskops in Zukunft im Bedarfsfall zumindestens kurzfristig als Ersatz-Trägheitsnavigationssystem eingesetzt werden kann.
Während seines bisherigen Missionsverlaufes hat der Mars Reconnaissance Orbiter mehr Daten über den Mars gesammelt als alle vorherigen oder gegenwärtig aktiven Marsmissionen zusammen. Zusätzlich wird das Kommunikationssystem des MRO als Relaisstation genutzt, um Daten von den beiden derzeit auf dem Mars aktiven Rovern Opportunity und Curiosity zur Erde zu übermitteln (Raumfahrer.net berichtete).
Diskutieren Sie mit im Raumcon-Forum: