Es gibt einen neuen Plan, um den Marsmaulwurf des Deutschen Zentrums für Luft- und Raumfahrt (DLR) auf der NASA-Mission InSight zu unterstützen. Robotischer Arm soll Gehäuse anheben und Maulwurf beim Hämmern helfen. Eine Pressemitteilung des DLR.
Quelle: DLR.
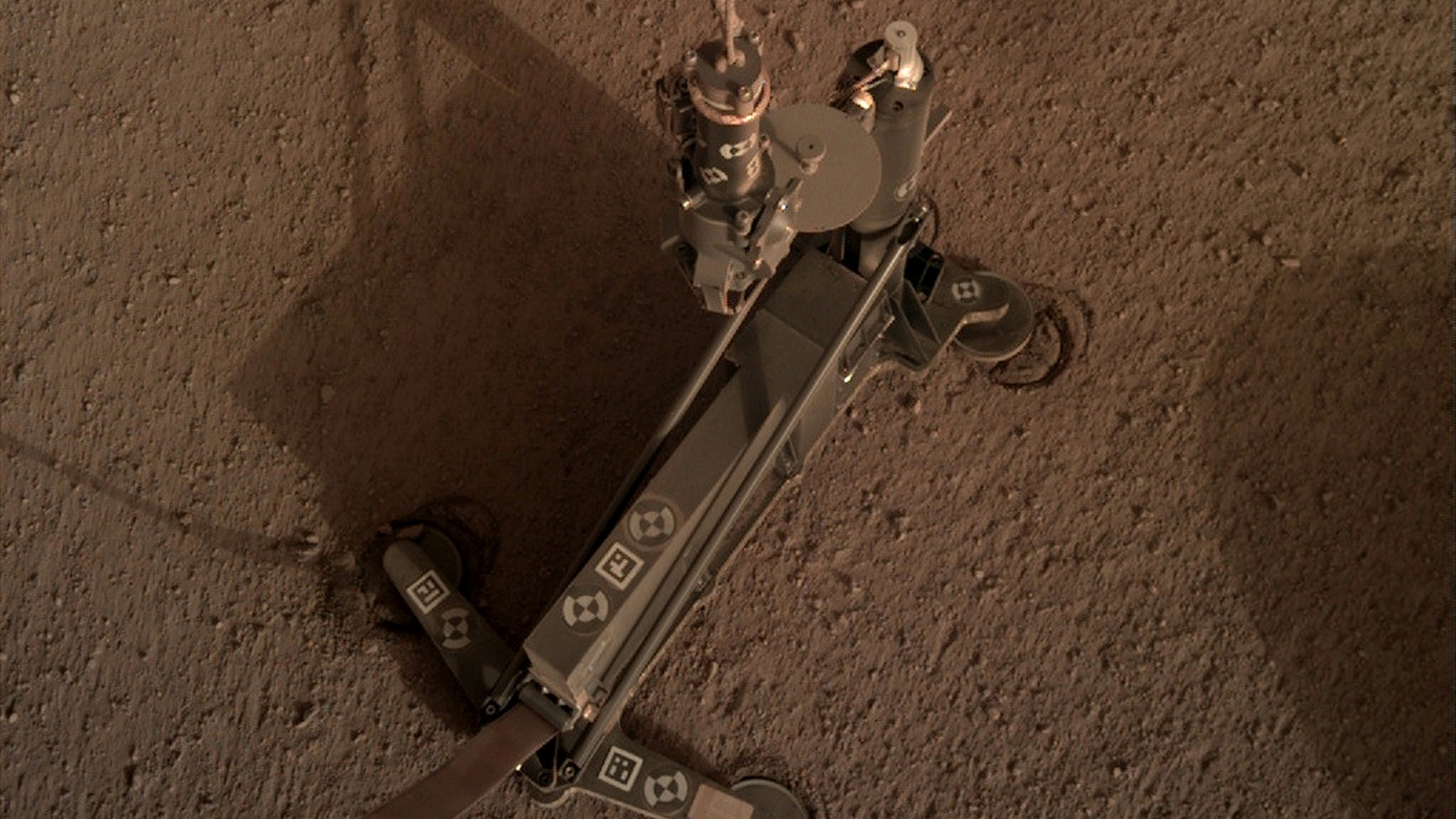
(Bild: NASA / JPL Caltech)
5. Juni 2019 – Der Maulwurf HP3 ist eine Art selbstschlagender Nagel, der bisher etwa 30 Zentimeter tief in den Marsboden vorgedrungen ist. Seit dem 28. Februar 2019 war es nicht mehr möglich, tiefer in den Boden zu gelangen. Tests mit dem Maulwurf auf dem Mars sowie Tests mit Nachbauten der Rammsonde beim DLR in Deutschland und am Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien gaben Einblicke in die möglichen Ursachen der Situation. Wahrscheinlich ist der Halt des Maulwurfs im umgebenden Boden unter der geringeren Schwerkraft auf dem Mars nicht ausreichend, wobei sich auch kleine spaltförmige Hohlräume zwischen Maulwurf und Boden ausgebildet haben könnten. Nun planen die Wissenschaftler und Ingenieure der InSight-Mission, die auf dem Maulwurf sitzende Stützstruktur mit dem Roboterarm des Landers wegzuheben. Von dem Gehäuse befreit, kann die Situation genauer betrachtet werden und es wird möglich, die Rammsonde beim weiteren Hämmern direkt mit dem robotischen Arm zu unterstützen.
Der Hubvorgang wird im Juni schrittweise kommandiert. Zunächst wird die Stützstruktur gegriffen. Im Laufe einer Woche wird der Arm dann die Struktur in drei Schritten anheben und Bilder aufnehmen. Mit dem behutsamen Vorgehen wollen die Ingenieure sicherstellen, dass der Maulwurf, der bereits zu Dreivierteln im Boden ist, nicht herausgezogen wird.
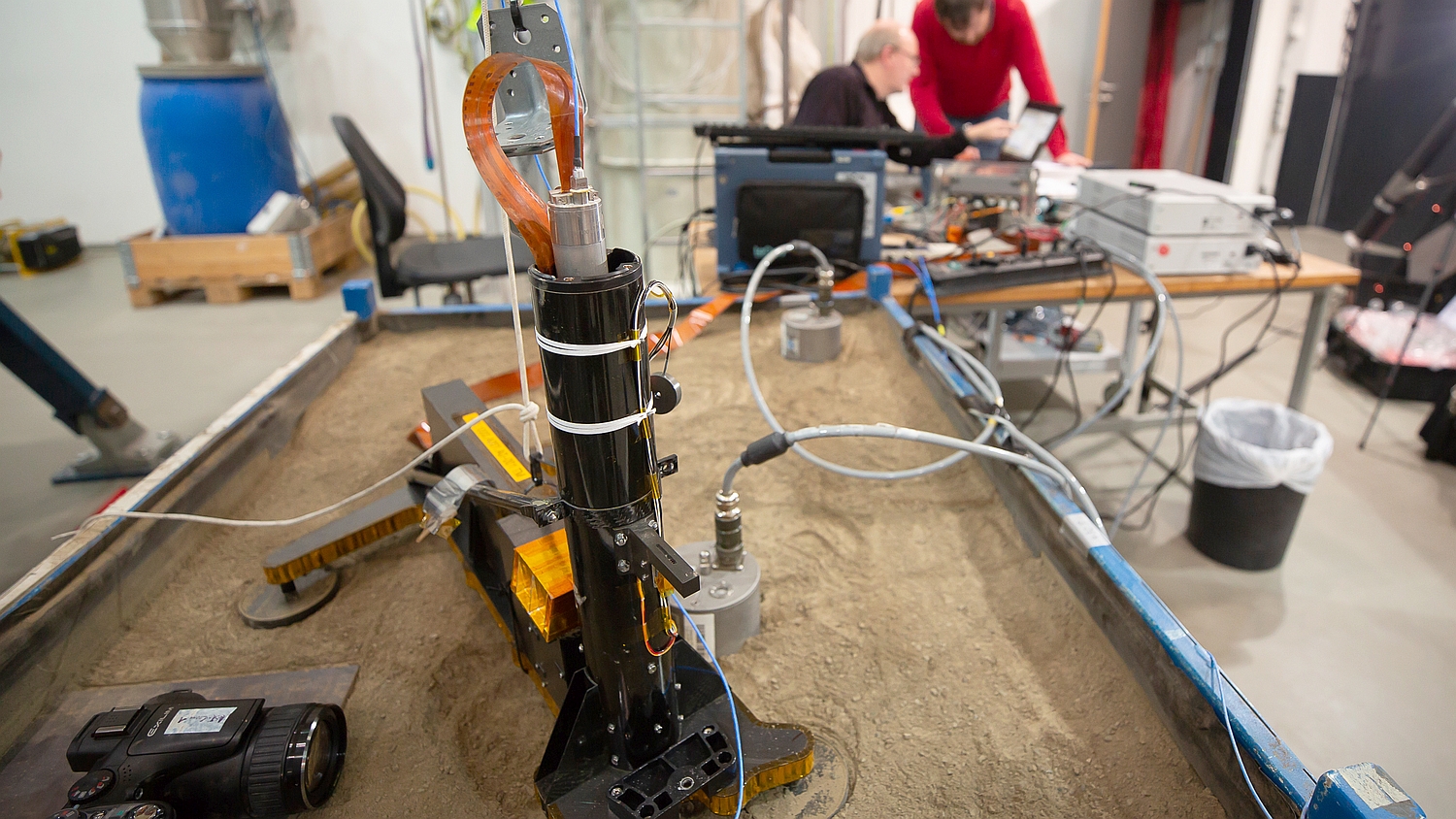
(Bild: DLR (CC-BY 3.0))
„Wir wollen die Stützstruktur anheben, weil wir den Maulwurf unter der Hülle und im Boden bisher nicht sehen können und so auch nicht genau wissen in welcher Situation er sich befindet“, sagt der wissenschaftliche Leiter des HP3-Experiments Prof. Tilman Spohn vom DLR-Institut für Planetenforschung. „Ziemlich sicher sind wir uns mittlerweile, dass dem Maulwurf der mangelnde Halt im Boden zu schaffen macht, weil die Reibung des umgebenden Regoliths unter der geringeren Schwerkraft des Mars deutlich schwächer ausfällt als erwartet.“ Am DLR-Institut für Raumfahrtsysteme in Bremen durchgeführte Tests haben bestätigt, dass dies unter unglücklichen Umständen geschehen kann. Seitlicher Halt und Reibung sind wichtig für den Maulwurf, da der bei jedem Schlag erzeugte Rückstoß durch Reibung am Boden aufgefangen werden muss.
Zudem besteht weiter die Möglichkeit, dass der Marsmaulwurf einen Stein getroffen hat. Die Rammsonde wurde allerdings so konzipiert, dass sie kleinere Steine wegdrücken kann. Sie könnte aber aktuell zwischen einem Stein und der umgebenden Stützstruktur eingeklemmt sein. Wenn dies der Fall ist, kann eine Bewegung der Stützstruktur es ermöglichen, das Hindernis zu überwinden. Der Landeplatz wurde so gewählt, dass er flach ist und so wenige Steine wie möglich an der Oberfläche zeigt. Das bedeutet in der Regel, dass es im Boden ebenfalls weniger Steine gibt. „Wir gehen davon aus, dass die Wahrscheinlichkeit einen zu großen Stein zu treffen nur bei wenigen Prozent liegt“, so Spohn weiter.
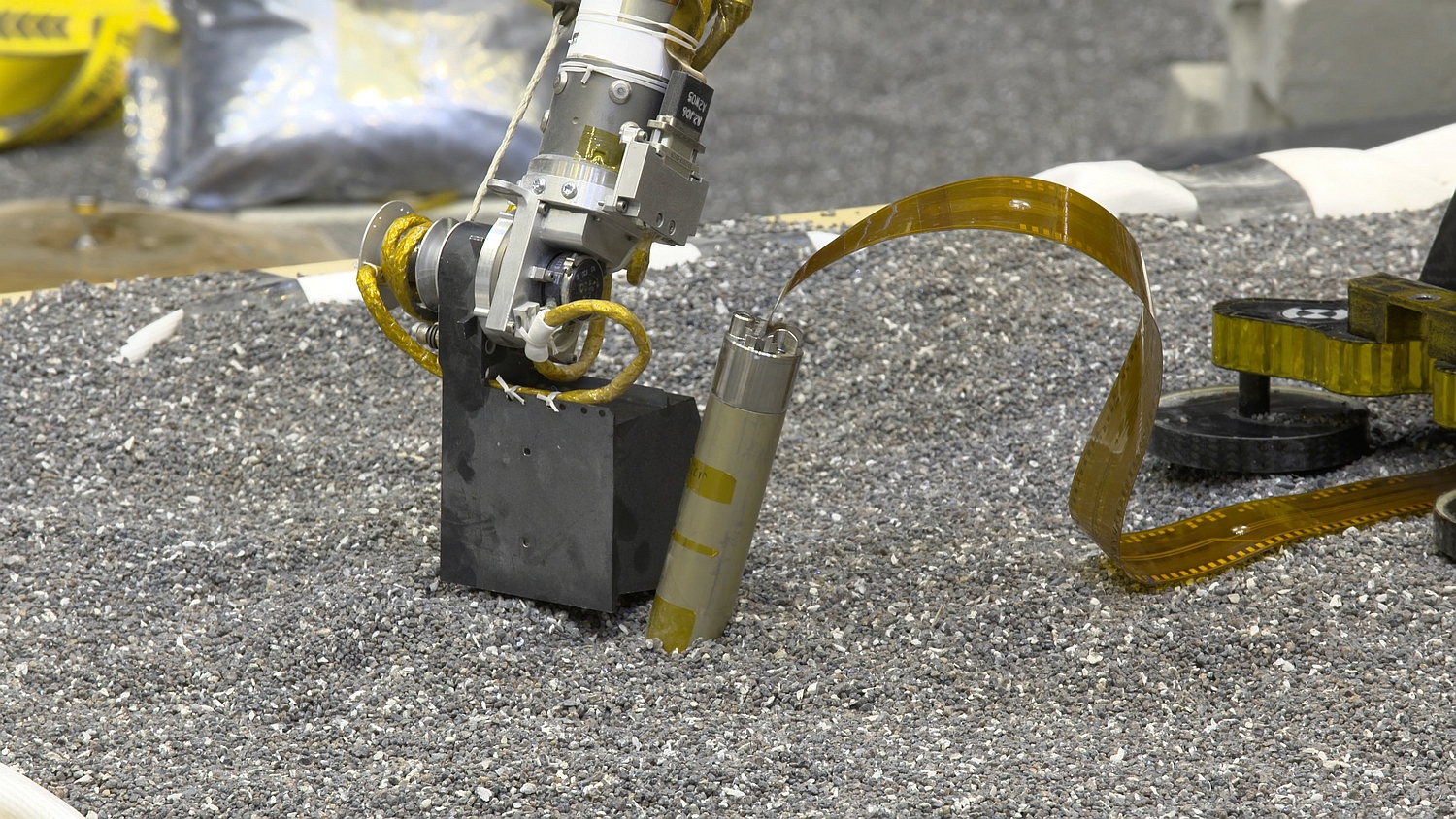
(Bild: NASA / JPL Caltech)
Nach anheben des Gehäuses wollen die Forscher entscheiden, wie sie dem Maulwurf am besten helfen können. „Wir planen den Roboterarm zu nutzen, um nah am Maulwurf auf den Boden zu drücken. Durch die zusätzliche Last erhöht sich der Druck auf den Maulwurf und damit die Reibung an seiner Außenwand“, erklärt Spohn. „Unsere Berechnungen am DLR zeigen, dass wir nahe an das Gerät heranmüssen. Unmittelbar über dem Maulwurf, der ja etwas schräg im Boden sitzt, und nahe dran ist die Wirkung am größten. Ohne die Stützstruktur wegzunehmen, hätten wir zu viel Abstand und die Wirkung wäre zu gering.“
Behutsames Wegheben der Stützstruktur
Die Stützstruktur des HP3-Experiments wird schrittweise angehoben, da sich im Inneren des Gehäuses Federn befinden, die möglicherweise noch mit dem hinteren Ende des Marsmaulwurfs in Kontakt stehen. „Wenn das der Fall ist, sollten wir vorsichtig beim Anheben sein, damit wir nicht versehentlich die Rammsonde aus dem Boden ziehen“, sagt NASA-Ingenieur Troy Hudson. „Falls das passiert, können wir sie nicht wieder zurück in ihr Loch setzen oder sie anderweitig direkt mit dem robotischem Arm anheben. Also heben wir die Stützstruktur nach und nach an und prüfen, dass der Maulwurf nicht mitkommt.“ Ein Umsetzen des Maulwurfs würde zudem nicht weiterhelfen, selbst wenn der Arm die Raumsonde greifen könnte. „Wir denken, dass die aktuellen Schwierigkeiten am wahrscheinlichsten einem Mangel an Reibung im Mars-Regolith geschuldet sind. Selbst wenn wir also den Marsmaulwurf umsetzen könnten, würde das vermutlich nicht helfen, denn wir hätten an einer anderen Stelle immer noch das gleiche Reibungsproblem“, ergänzt Hudson.
Das HP3-Instrument auf der NASA-Mission InSight
Die Mission InSight wird vom Jet Propulsion Laboratory (JPL) in Pasadena, Kalifornien, im Auftrag des Wissenschaftsdirektorats der NASA durchgeführt. InSight ist eine Mission des NASA-Discovery-Programms. Das DLR steuert zur Mission das Experiment HP3 (Heat Flow and Physical Properties Package) bei. Die wissenschaftliche Leitung liegt beim DLR-Institut für Planetenforschung, welches das Experiment federführend in Zusammenarbeit mit den DLR-Instituten für Raumfahrtsysteme, Optische Sensorsysteme, Raumflugbetrieb und Astronautentraining, Faserverbundleichtbau und Adaptronik, Systemdynamik und Regelungstechnik sowie Robotik und Mechatronik entwickelt und realisiert hat. Daneben sind beteiligte industrielle Partner: Astronika und CBK Space Research Centre, Magson und Sonaca, das Institut für Photonische Technologie (IPHT) sowie die Astro- und Feinwerktechnik Adlershof GmbH. Wissenschaftliche Partner sind das ÖAW Institut für Weltraumforschung und die Universität Kaiserslautern. Der Betrieb von HP3 erfolgt durch das Nutzerzentrum für Weltraumexperimente (MUSC) des DLR in Köln. Darüber hinaus hat das DLR Raumfahrtmanagement mit Mitteln des Bundesministeriums für Wirtschaft und Energie einen Beitrag des Max-Planck-Instituts für Sonnensystemforschung zum französischen Hauptinstrument SEIS (Seismic Experiment for Interior Structure) gefördert.
Diskutieren Sie mit im Raumcon-Forum: