Die MastCam ist die Hauptkamera des Rovers Curiosity. Mit den beiden Optiken der MastCam können mittels verschiedener Filtersysteme Farbbilder der Marsoberfläche erstellt werden. Aus den angefertigten Aufnahmen lassen sich auch Falschfarbenaufnahmen erzeugen, welche es den an der Mission beteiligten Wissenschaftlern ermöglichen werden, Unterschiede in der mineralogischen Zusammensetzung der Marsoberfläche hervorzuheben.
Ein Beitrag von Ralph-Mirko Richter
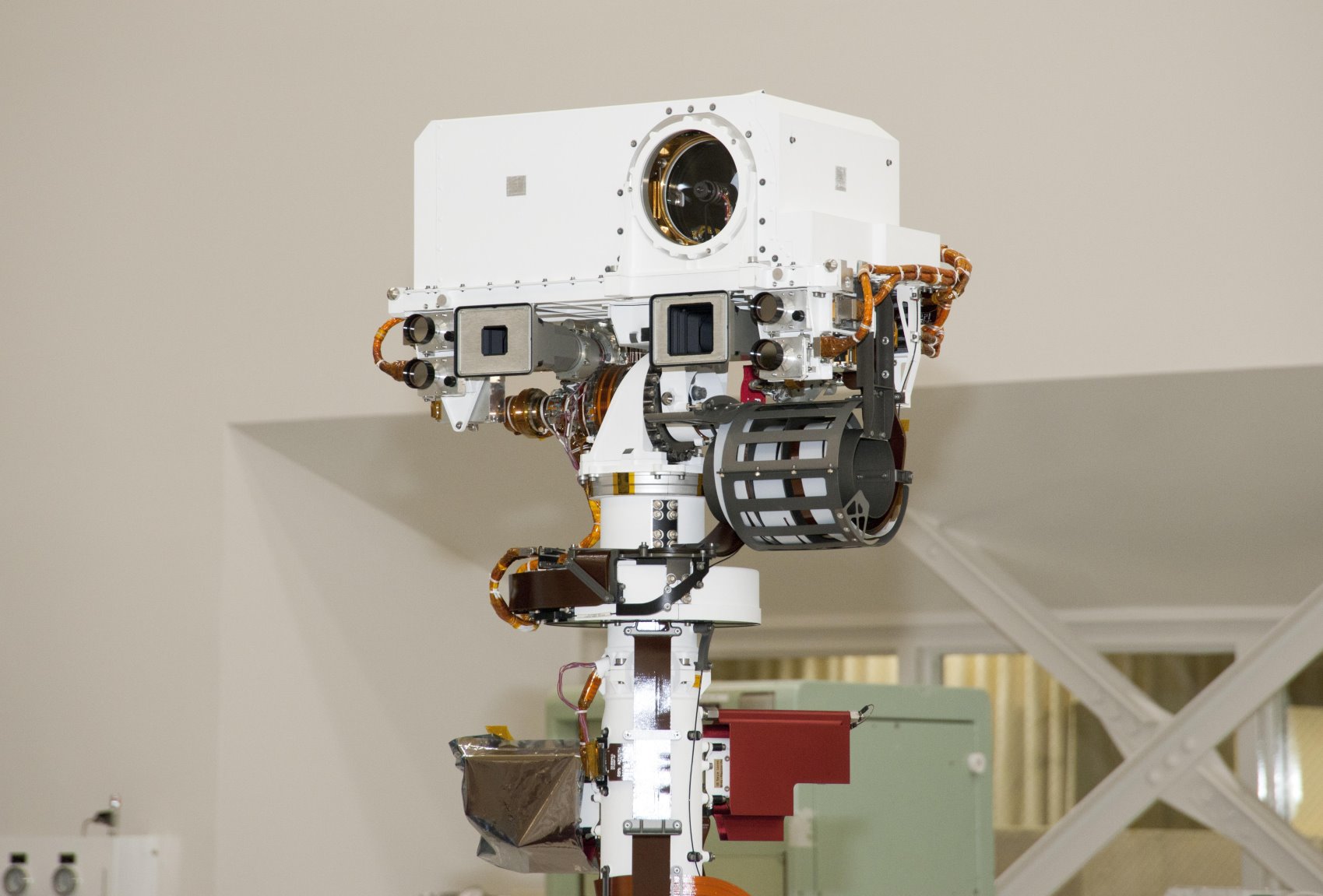
(Bild: NASA, JPL-Caltech)
Die „Mast Camera“ (kurz „MastCam“) des Marsrovers Curiosity verfügt im Wesentlichen über einen Aufbau, welcher mit dem Aufbau der Panoramakameras seiner beiden unmittelbaren Vorgänger, den Marsrovern Spirit und Opportunity, vergleichbar ist. Diese beiden Marsrover verfügen über jeweils zwei identische Panoramakameras, welche an einem speziellen Kameramast montiert sind und das umliegende Gelände bei einer fest eingestellten Brennweite von 43 Millimetern mit einem Gesichtsfeld von 16 x 16 Grad abbilden können. Der horizontale Versatz der Kameras um 30 Zentimeter hat zur Folge, dass in Entfernungen von minimal 5 Metern bis hin zu maximal etwa 100 Metern dreidimensionale Bilder anfertigen werden können.
Auch die beiden nochmals hochauflösenderen Optiken der MastCam von Curiosity sind am Oberteil eines Kameramastes, des „Remote Sensing Mast“, befestigt und befinden sich in einer Höhe von 1,97 Metern über der Marsoberfläche. Mit den durch die Kamera angefertigten Aufnahmen werden die an der Mission beteiligten Wissenschaftler die Topologie des umliegenden Geländes, feine Strukturen auf der Marsoberfläche und die Atmosphäre unseres Nachbarplaneten auf optischem Wege im sichtbaren und im nahem Infrarot-Spektrum untersuchen. Durch eine Überlagerung der zeitgleich angefertigten Aufnahmen der rechten und der linken Kameraoptik können dabei ebenfalls dreidimensionale Bilder der Umgebung erstellt werden. Der wissenschaftliche Sinn solcher 3D-Aufnahmen besteht darin, dass sich anhand dieser 3D-Bilder ein besser wissenschaftlicher Kontext für die Analyse der verschiedenen geologischen Formationen und der Auswertung der durch die anderen Instrumente gesammelten Daten herstellen lässt. Aus technischer Sicht sind diese 3D-Bilder sogar extrem wichtig, da durch sie die Steuerung eines Rovers durch ein ansonsten völlig unbekanntes Gelände auf der Marsoberfläche ungemein erleichtert wird.
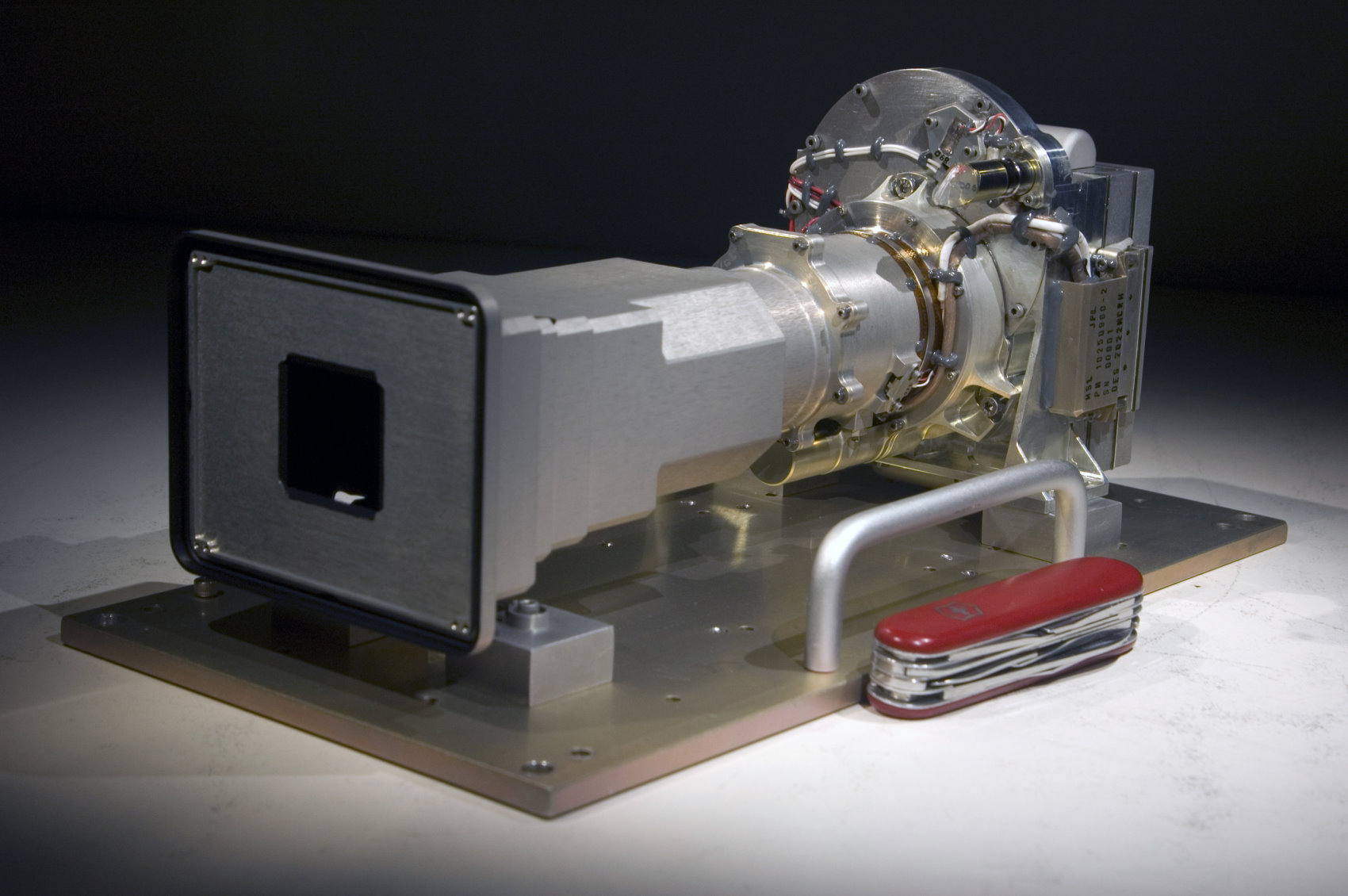
(Bild: NASA, JPL, Malin Space Science Systems)
Im Gegensatz zu den bei den Missionen von Spirit und Opportunity verwendeten Panoramakameras sind die beiden Kameras der Curiosity-MastCam allerdings nicht identisch. Eine der beiden Kameras, die in Fahrtrichtung rechts am Kameramast platzierte, so genannte „MastCam-34“, verfügt über eine fest eingestellte Brennweite von 34 Millimetern und deckt im Betrieb ein Gesichtsfeld von etwa 15 x 15 Grad ab. Die MastCam-34 erreicht die 1,25-fache räumliche Auflösung der bei den Rovern Spirit und Opportunity verwendeten Panoramakameras. Die zweite Kamera, die etwa 25 Zentimeter entfernt gelegene „MastCam-100“, besitzt eine feste Brennweite von 100 Millimetern und gibt mit ihren Aufnahmen ein Gesichtfeld von 5,1 x 5,1 Grad wieder. Die MastCam-100 erreicht dabei die 3,67-fache Auflösung der Panoramakameras.
Beide Kameras verwenden dabei einen baugleichen Bayer-Sensor, welcher eine Auflösung von 1200 x 1200 Pixel – dies entspricht 1,44 Megapixeln – erreicht und der dabei theoretisch in der Lage ist, 720p-Videos in einer Auflösung von 1.280 x 720 Pixeln mit einer Aufnahmerate von bis zu 10 Bildern pro Sekunde anzufertigen.
Auch die für die Verarbeitung und Zwischenspeicherung der Bilddaten verwendete Elektronik der beiden von der in San Diego im US-Bundesstaat Kalifornien ansässigen Firma Malin Space Science Systems (MSSS) entwickelten und gebauten Mast-Kameras ist identisch. Die durch die MastCam angefertigten Aufnahmen können entweder verlustfrei oder verlustbehaftet mittels des JPEG-Verfahrens komprimiert und anschließend in einem Computerspeicher abgelegt werden. Jede der beiden Kameras verfügt hierfür über einen eigenen Flash-Speicher mit einer Kapazität von acht GB, in welchem sich jeweils mehr als 5.500 unbearbeitete Aufnahmen vor ihrer Übertragung an das Rover-Kontrollzentrum in Pasadena/USA speichern lassen.
Es ist geplant, von allen durch die MastCam angefertigten Aufnahmen zuerst verkleinerte Vorschau-Versionen in einer Größe von etwa 150 x 200 Pixeln an das Kontrollzentrum zu übermitteln. Anhand dieser „Thumbnail Images“ wird das wissenschaftliche Team eine Prioritätsliste erstellen und entscheiden, welche Aufnahmen anschließend in welcher Reihenfolge in ihrer vollen Auflösung übertragen werden.
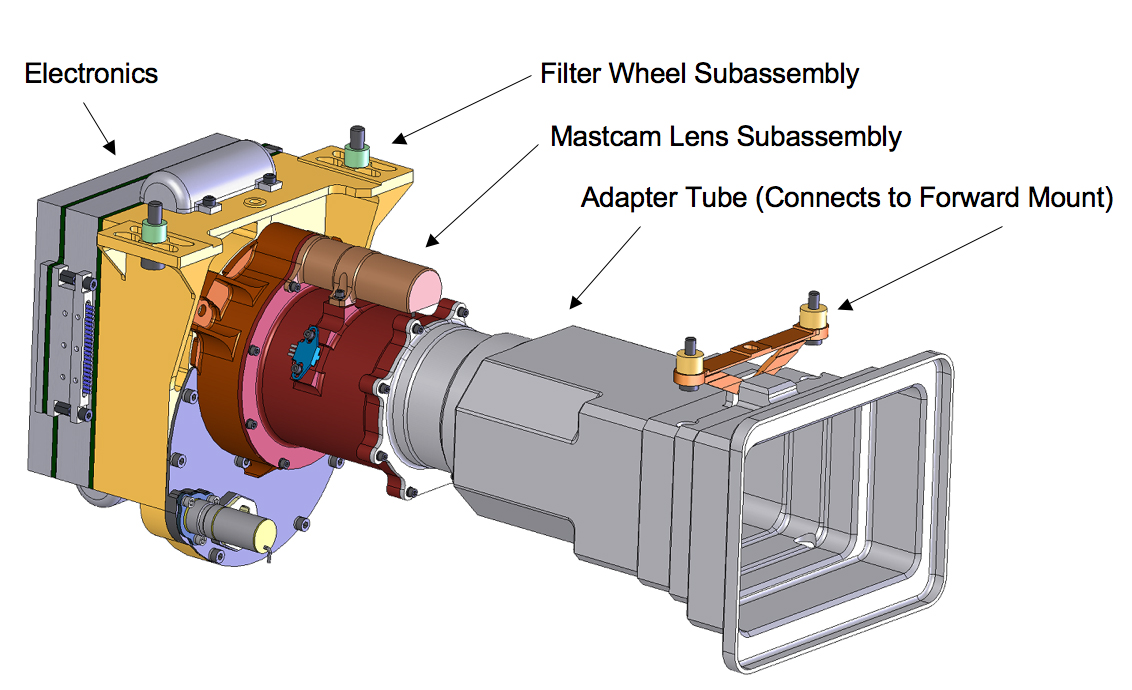
(Bild: NASA, JPL, Malin Space Science Systems)
Beide Kameras können über einen Bereich von zwei Metern bis ins Unendliche fokussieren, wobei die höher auflösende MastCam-100 bei einer Distanz von 2,1 Metern zum angepeilten Ziel Oberflächenstrukturen mit einer Genauigkeit von bis zu lediglich 0,15 Millimetern pro Pixel auflösen kann. In einer Entfernung von 1.000 Metern zum Ziel erreicht diese Kamera dagegen immer noch eine Auflösung von etwa 7,4 Zentimetern pro Pixel. Die MastCam-34 kann dagegen aus einer Entfernung von 2,1 Metern Strukturen von etwa 0,45 Millimetern und aus einer Entfernung von 1.000 Metern Strukturen von 22 Zentimetern Größe pro Pixel wiedergeben.
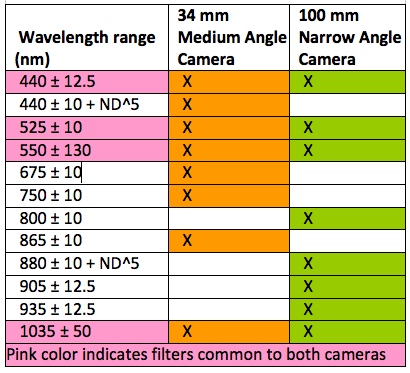
Beide Kameras sind mit einem Filtersystem ausgestattet, welches die Abbildung der zu untersuchenden Strukturen in unterschiedlichen Längenbereichen des Lichtes ermöglicht. Durch die Verwendung dieser Filter ist es möglich, die Oberfläche unseres Nachbarplaneten sowohl in Echtfarben als auch in so genannten Falschfarben wiederzugeben. Speziell durch diese Falschfarben-Aufnahmen wird es möglich sein, Unterschiede in der mineralogischen Zusammensetzung des Bodens hervorzuheben.
Die zur Verfügung stehenden Filter sind auf einem Rad vor dem Bildsensor der jeweiligen Kamera montiert und werden diesem je nach Bedarf durch eine Drehung des Filterrades vorgeschaltet. Jede der beiden Kameras verfügt über jeweils acht Filter, wobei die MastCam-34 eher auf den sichtbaren, die MastCam-100 dagegen eher auf den infraroten Bereich des Lichtes ausgelegt ist. Die beiden Filterräder sind so ausgelegt, dass es etwa fünf bis acht Sekunden dauert, bis die Kameras von einem Filter auf den nächsten wechseln können. Die MastCam-34 kann dabei innerhalb von etwa 25 Minuten 150 hochaufgelöste Aufnahmen anfertigen, welche die Umgebung in einem 60-Grad-Panorama in Echtfarben wiedergibt. Die Erstellung eines farbigen 360-Grad-Panoramas ist innerhalb einer Stunde möglich.
Die beiden MastCams des Marsrovers Curiosity sollen im Rahmen der Mission hauptsächlich die folgenden wissenschaftlichen Zielsetzungen erfüllen:
- Beobachtung und Dokumentation der Marsoberfläche zwecks Erstellung einer vollständigen Beschreibung der Topografie, der Geomorphologie und der geologischen Rahmenbedingungen im Bereich des Landegebietes „Gale-Krater“.
- Ermittlung der Abmessungen von Oberflächenformationen und Bodenaufschlüssen und der Dokumentation von Interaktionen zwischen den Hardwarekomponenten des Rovers und der Marsoberfläche (in welchem Umfang dringen zum Beispiel die Räder des Rovers bei einer erfolgenden Fahrt in die Oberfläche ein?). Hierdurch sollen unter anderem die Morphologie, Zusammensetzung, Struktur, Mineralogien und Stratigrafie der einzelnen Gesteins- und Oberflächentypen ermittelt werden. Aus diesen Erkenntnissen erhoffen sich die Wissenschaftler weitere Informationen über die Prozesse, welche zur Bildung der aktuellen Oberfläche führten und über die Prozesse und das Ausmaß, welche zu deren anschließenden Verwitterung führten.
- Studium der Disaggregation des Oberflächenmaterials: In welchem Umfang beeinflussen sich die auf der Marsoberfläche befindlichen Objekte (von Felsen über Sandkörner bis hin zum Staub) gegenseitig.
- Die Beobachtung von eventuell vorhandenen Frost- und Eisablagerungen und von allgemeinen periglazialen Strukturen. Sofern diese vorhanden sind, soll deren aktuelle Position, Ausdehnung und vertikale Mächtigkeit bestimmt werden und unter anderem in einen Kontext mit dem Vorhandensein von Regolith gesetzt werden. Außerdem sollen diese Ablagerungen und eventuell erfolgende Veränderungen über einen längeren Zeitraum beobachtet werden.
- Dokumentation sowohl allgemeiner atmosphärischer und meteorologischer Ereignisse als auch spezieller und dabei zeitlich begrenzter Vorgänge wie zum Beispiel Wolkenbildung und -bewegung, der Aktion von Staubteufeln oder kurzfristig auftretende Staubbewegungen unmittelbar auf oder direkt oberhalb der Planetenoberfläche beziehungsweise in der unteren Atmosphärenschicht.
- Unterstützung der allgemeinen Aktivitäten des Rovers: Zum einen werden die Aufnahmen der MastCam durch die hochaufgelöste Wiedergabe der Umgebung die Arbeit der für die Steuerung des Rovers verantwortlichen Roverdriver ungemein erleichtern. Zum anderen werden diese Aufnahmen dazu genutzt, um für die anderen wissenschaftlichen Instrumente Curiositys bereits aus Entfernungen von teilweise bis zu über 100 Metern potentiell interessante Forschungsziele auszuwählen, welche anschließend zwecks eingehender Analysen direkt angesteuert werden können.

(Bild: NASA, JPL, Malin Space Science Systems)
Das für den Betrieb der MastCam und die damit verbundene Datenauswertung verantwortliche Team umfasst unter anderem mehrere Personen, welche bereits zuvor im Rahmen verschiedener Marsmissionen der NASA aktiv waren. Michael C. Malin, der Gründer der für die Entwicklung und den Bau der MastCam verantwortlichen Firma Malin Space Science Systems (MSSS) und der zugleich für deren Betrieb hauptverantwortliche Wissenschaftler, war bereits zuvor für die Entwicklung verschiedener Kameras verantwortlich, welche im Rahmen früherer NASA-Missionen zum Mars, zum Erdmond und zu erdnahen Asteroiden geflogen sind beziehungsweise immer noch aktiv sind. Ein weiterer beteiligter Wissenschaftler, James Bell von der Arizona State University, ist federführend an der Mission des immer noch aktiven Marsrovers Opportunity beteiligt und dabei speziell für den Betrieb von dessen beiden Panoramakameras verantwortlich. Mark T. Lemmon von der Texas A&M University war dagegen im Jahr 2008 der für die Mastkamera des Marslanders Phoenix hauptverantwortliche Wissenschaftler.
Eine weitere direkt in die Aktivitäten der MastCam involvierte Person dürfte allerdings auch der weniger an der Marsforschung interessierten Öffentlichkeit bekannt sein. James Francis Cameron, der unter anderem für seine auf der 3D-Technik beruhenden Spiel- und Dokumentarfilme berühmt gewordene Regisseur, ist ebenfalls in die Curiosity-Mission involviert und dabei für die Video-Dokumentation dieser Mission verantwortlich, welche zu einem nicht unwesentlichen Teil auf den diversen Aufnahmen der MastCam basieren wird.
Die beiden Kameras MastCam-34 und MastCam-100 wurden bereits im Jahr 2010 in einem Reinraum des JPL auf dem Rover Curiosity montiert. Allerdings handelt es sich dabei nicht um die Kameraversionen, welche ursprünglich für diese Mission vorgesehen waren. Das eigentliche Konzept von MSSS sah vor, dass Curiosity über zwei baugleiche MastCams verfügen sollte, welche die Umgebung mittels einer stufenlos variierbare Brennweite zwischen 6,5 und 100 Millimetern wiedergeben können. Aufgrund der im Rahmen der Curiosity-Mission auftretenden Kostenüberschreitungen entschied sich die NASA im September 2007 dazu, dieses ursprünglich vorgesehene Kamerasystem zu vereinfachen. Hieraus resultierten die beiden jetzt verwendeten Kamerasysteme mit fest eingestellten Brennweiten von 34 beziehungsweise 100 Millimetern. Die dadurch erreichte Kosteneinsparung belief sich allerdings auf lediglich rund 1,5 Millionen US-Dollar.
In der Folgezeit setzte sich bei der NASA die Meinung durch, diese beiden Kameras wieder durch die ursprünglich vorgesehen Zoom-Versionen zu ersetzen. Die Herstellerfirma MSSS nahm darauf hin die zuvor eingestellten Arbeiten an der Entwicklung und dem Bau der Zoom-Kameras wieder auf. Trotz aller Anstrengungen war es allerdings nicht möglich, diese Kameras rechtzeitig fertig zu stellen und anschließend noch ausreichend zu testen. Die Auslieferung der neu gebauten Zoom-Kameras an das JPL erfolgte Anfang des Jahres 2011. Dies war leider zu kurzfristig, um die äußerst komplizierten und anspruchsvollen Kameras und die mit ihnen verbundenen elektronischen Komponenten im erforderlichen Umfang zu testen und rechtzeitig vor dem Start von der Erde in der Hardware des Rovers zu integrieren. Aber auch die beiden jetzt verwendeten Kameras werden in der Lage sein, die für sie gesetzten Ziele im vollen Umfang zu erfüllen.
Verwandte Artikel
- Mars in HD und 3D (09.05.2010)