Wie bereits seine beiden Vorgänger, die Marsrover Spirit und Opportunity, verfügt auch der Rover Curiosity für die Kommunikation mit seinem am Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien befindlichen Kontrollzentrum über drei voneinander unabhängige Antennensysteme, welche in zwei Kommunikationskomplexen angeordnet sind.
Ein Beitrag von Karl Urban. Quelle: NASA.
Die direkte Kommunikation zwischen Curiosity und der Erde

(Bild: NASA, JPL-Caltech)
Für die direkte Kommunikation zwischen dem Kontrollzentrum auf der Erde und dem Rover, der sogenannten „Direct to Earth“-Kommunikation (kurz „DTE“) für das Senden und der „Direct from Earth“-Kommunikation (kurz „DFE“) für das Empfangen von Daten, verfügt Curiosity über eine schwenkbare Hochgewinnantenne (engl. „High Gain Antenna“, kurz „HGA“), welche auf dem Roverdeck montiert ist. Es handelt sich hierbei um eine Patchantenne, welche über eine sehr starke Richtwirkung verfügt. Curiositys sechseckige HGA weist einen Durchmesser von 25,5 x 29,4 Zentimetern auf und verfügt über ein Gewicht von etwa acht Kilogramm.
Trotz einer geringen Verstärkerleistung lassen sich mit dieser Antenne relativ hohe Datenübertragungsraten erzielen, wobei die HGA während des Betriebes allerdings äußerst präzise auf ihre jeweilige Empfangsstation auf der Erde ausgerichtet sein muss. Im Sendebetrieb liegt der Antennengewinn bei einer optimalen Ausrichtung der HGA-Antenne bei einem Wert von 26 dB, beim Empfang von Daten beträgt der Gewinn 21 dB. Bereits eine Fehlausrichtung der Antenne von lediglich acht Grad führt zu einer Halbierung dieser Werte. Liegt die Abweichung dagegen bei einem Wert von mehr als 12 Grad, so ist keine direkte Kommunikation zwischen der Erde und dem Rover möglich.
Im Sendebetrieb liegt die Datenübertragungsrate der HGA-Antenne in einem Bereich zwischen 500 und 32.000 Bits pro Sekunde. Von der Erde eingehende Datenübertragungen werden dagegen typischerweise mit einer Rate von 190 Bit pro Sekunde empfangen. Die vorgesehenen Kommunikationsphasen im Rahmen einer DFE-Verbindung verfügen in der Regel über eine Dauer von 10 bis 15 Minuten. Dies ist ausreichend, um den Rover in diesem Zeitraum seine neuesten täglichen Befehle zu übermitteln.
Curiosity sendet bei einer Frequenz von 8.395 MHz, der Empfang findet bei 7.183 MHz statt. Vorgesehen ist der Einsatz der HGA in erster Linie für das Senden von Statusdaten und Telemetriewerten des Rovers an sein Kontrollzentrum sowie für das Empfangen der dort erstellten Kommandos für die verschiedenen Aktivitäten Curiositys auf der Marsoberfläche.
Sollte im Verlauf der Mission ein Problem mit der HGA-Antenne auftreten, so verfügt Curiosity zusätzlich über eine „Low Gain Antenna“ (kurz „LGA“). Diese LGA verfügt über praktisch keinerlei Richtwirkung, so dass der Rover mittels der LGA fast aus jeder Position heraus mit der Erde kommunizieren kann. Allerdings reduziert diese Eigenschaft der Antenne die erreichbare Datenrate auf einen Wert von lediglich wenigen Dutzend Bit pro Sekunde, so dass der Einsatz der LGA nur in Notfällen vorgesehen ist. Sowohl die HGA als auch die LGA senden und empfangen im Frequenzbereich des X-Bandes.
Datenübertragung via Relaisstation im Marsorbit
(Bild: NASA)
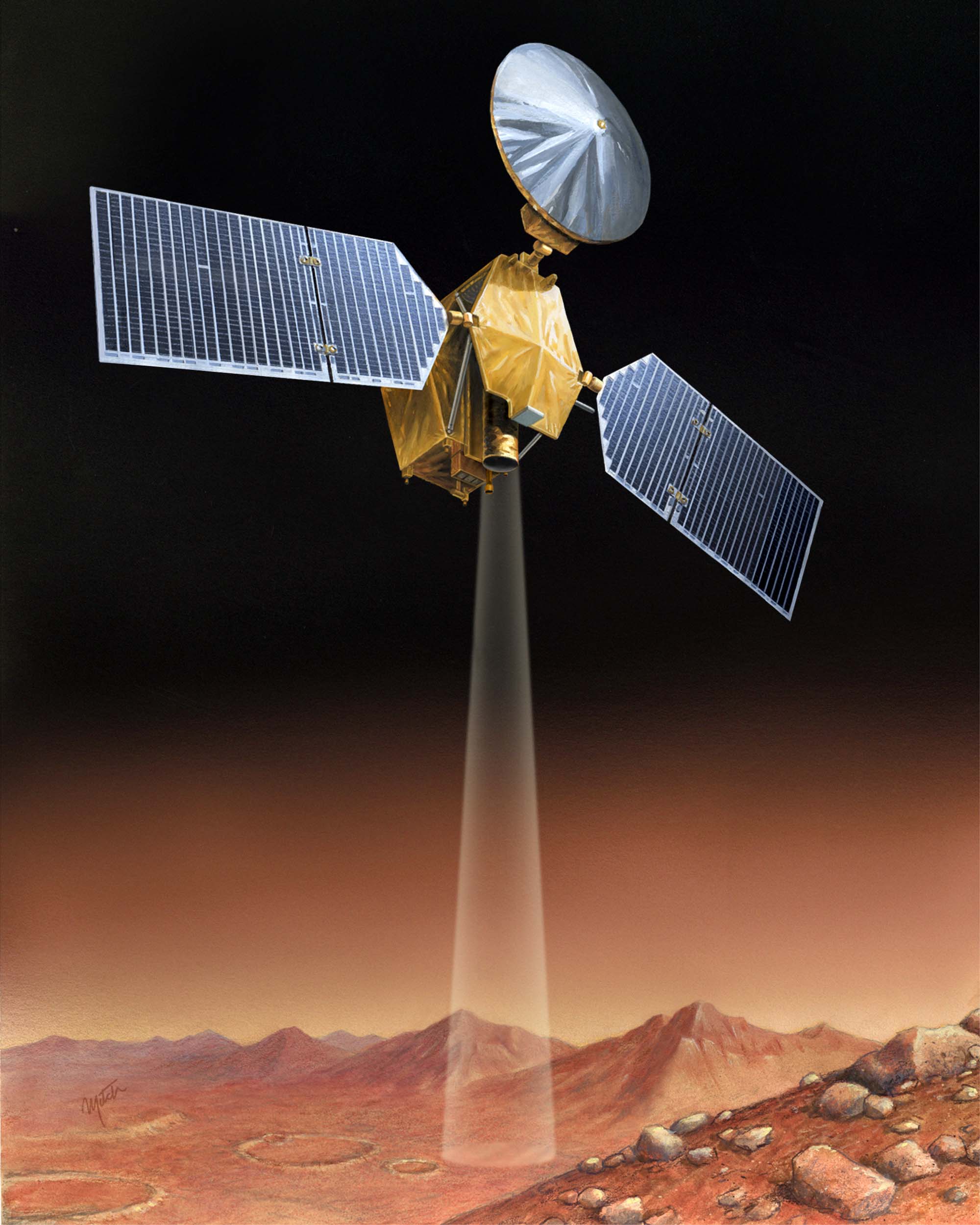
Der Großteil der im Rahmen der Curiosity-Mission gesammelten wissenschaftlichen Daten soll dagegen mit Hilfe einer im Orbit um den Mars befindliche „Kommunikationsrelaisstation“ an das Rover-Kontrollzentrum übertragen werden. Hierfür ist der ebenfalls von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsorbiters Mars Reconnaissance Orbiter (MRO) vorgesehen. Da der MRO den Mars in einer Höhe von nur wenigen hundert Kilometern über dessen Oberfläche umkreist, kann Curiosity seine zuvor gesammelten Daten und angefertigte Aufnahmen der Planetenoberfläche mit einem im Vergleich zu einer direkten Übermittlung zur Erde relativ geringen Energieverbrauch und in einem verhältnismäßig kurzen Zeitraum an den Orbiter übermitteln. Zu diesem Zweck – der Kommunikation mit einem nur wenige hundert Kilometer entfernt befindlichen Marsorbiter – wurde Curiosity mit einer „Rover UHF Antenna“ (RUHF) ausgestattet. Bei der RUHF handelt es sich um eine ebenfalls auf dem Roverdeck montierte Wendelantenne, welche aufgrund ihrer schwachen Richtwirkung in einem relativ großen Winkelbereich einen Antennengewinn von etwa drei bis sechs dB erreicht.
Die über die RUHF-Antenne ausgestrahlten Daten werden im Frequenzbereich des UHF-Bandes bei 401 MHz ausgestrahlt. Der Datenempfang erfolgt dagegen bei 437 MHz. Curiositys UHF-System verfügt über zwei redundante Transmitter, platziert im sogenannten „Electra Lite Transponder“ (ELT), welche alle für die Verarbeitung und Erzeugung von Funksignalen notwendigen Bauteile enthalten. Jeder der beiden Transmitter wiegt drei Kilogramm und benötigt im Betrieb eine elektrische Leistung von bis zu 96 Watt.
Unter optimalen Umständen kann Curiosity im UHF-Sendebetrieb pro Sekunde eine Datenmenge von bis zu zwei Millionen Bit an den MRO übermitteln. Im Empfangsmodus werden bis zu 256 KBit pro Sekunde erreicht. Die von Curiosity ausgesandten Daten werden von dem UHF-Kommunikationssystem des Mars Reconnaissance Orbiter empfangen, von diesem verarbeitet und anschließend über das Hochleistungssendesystem des Orbiters im X-Band-Bereich an die Erde weitergeleitet. Curiosity wird pro Marstag für etwa acht Minuten in der Lage sein, mit dem MRO kommunizieren. In diesem Zeitraum, so die Einschätzung der NASA, kann Curiosity zwischen 100 und 250 Megabit an Daten an diesen übermitteln. Bei einer ausschließlich über die HGA-Antenne erfolgenden „Direct to Earth“-Kommunikation würde man dagegen für die Übermittlung einer Datenmenge von 250 Megabits einen Zeitraum von bis zu 20 Stunden benötigen.
Im Vergleich zu den früheren Marsorbitern ist der seit dem März 2006 in einer Umlaufbahn um den Mars befindliche MRO mit einem neuartigen Kommunikationssystem ausgestattet, welches die Übermittlung von zuvor nie erreichten Datenmengen an die Erde ermöglicht. Theoretisch kann die dabei erreichte Datenübertragungsrate einen Wert von bis zu sechs Megabit pro Sekunde erreichen. Zu diesem Zweck verfügt der MRO unter anderem über eine drei Meter durchmessenden Parabolantenne, welche wohl als das hervorstechende optische Merkmal in der Struktur dieser Raumsonde bezeichnet werden kann.
Sollte der Mars Reconnaissance Orbiter während der Curiosity-Mission aufgrund eines technischen Defektes ausfallen und somit nicht mehr als Datenrelaisstation zur Verfügung stehen, so könnte auch der zweite derzeit aktive Marsorbiter der NASA, die bereits seit dem Oktober 2001 in einem Marsorbit befindliche Raumsonde Mars Odyssey, die Funktion des MRO übernehmen. Hierbei würde allerdings die maximal erreichbare Datenübertragungsrate abhängig von dem von Mars Odyssey verwendeten Kommunikationssystem auf 128.000 beziehungsweise 256.000 Bits pro Sekunde sinken.
Eine weitere Alternative bietet sich durch den dritten gegenwärtig aktiven Marsorbiter, der von der europäischen Weltraumagentur ESA betriebenen Marssonde Mars Express. Auch das UHF-System von Mars Express ist in der Lage, mit Curiosity zu kommunizieren und die von der Marsoberfläche empfangenen Daten an das Rover-Kontrollzentrum weiterzuleiten. Allerdings ist dies nur kurzzeitig und während eventuell eintretender Notsituationen wie zum Beispiel einem zeitgleich auftretenden Sicherheitsmodus der beiden NASA-Orbiter vorgesehen – jedoch keineswegs als Dauerlösung.
Sollten während der Curiosity-Mission tatsächlich sowohl der Mars Reconnaissance Orbiter als auch Mars Odyssey dauerhaft ausfallen (beide Missionen befinden sich immerhin bereits seit mehreren Jahren in einer Marsumlaufbahn und wurden mittlerweile jeweils mehrfach von der NASA verlängert), so könnte die Datenübertragung nur noch auf direktem Weg durch die HGA-Antenne erfolgen. Trotz dieser sich daraus ergebenden gravierenden Begrenzungen der Datenübertragungsraten wäre die weitere Fortführung der Mission in diesem hoffentlich nicht eintretenden Fall nicht gefährdet. Allerdings würde sich das Volumen der an das Kontrollzentrum übermittelten Datenmenge sehr wahrscheinlich mehr als deutlich reduzieren.
Einen Ersatz für die drei derzeit aktiven Marsorbiter wird es frühestens ab dem Herbst 2014 geben. Ab dann wird sich der nächste Marsorbiter der NASA, die für einen Start im November 2013 vorgesehene Marsmission MAVEN, in einer Umlaufbahn um unseren äußeren Nachbarplaneten befinden.
Das Deep Space Network der NASA

(Bild: NASA)
Die von dem Marsrover Curiosity in Richtung Erde ausgesandten Daten werden auf unserem Heimatplaneten zunächst von den verschiedenen Antennen des Deep Space Network (DSN) der NASA empfangen. Bei dem DSN handelt es sich um ein über den gesamten Globus verteiltes Netzwerk aus Parabolantennen, mit denen die US-amerikanische Weltraumbehörde die Kommunikation mit ihren verschiedenen interplanetaren Weltraummissionen abwickelt. Die drei größten Standorte des DSN befinden sich auf einem in der Mojave-Wüste im US-Bundesstaat Kalifornien befindlichen Stützpunkt der US-Army, 40 Kilometer südwestlich der australischen Hauptstadt Canberra und 60 Kilometer westlich von Madrid/Spanien. Jede dieser Stationen verfügt neben mehreren kleineren Parabolantennen über jeweils mindestens eine 26-Meter-Antenne, zwei 34-Meter-Antennen und eine 70-Meter-Antenne. Neben der interplanetaren Kommunikation werden diese Antennensysteme zum Beispiel auch für radioastronomische Forschungen oder für die Radaruntersuchung erdnaher Asteroiden eingesetzt.
Die Verteilung der einzelnen Stationen über den gesamten Globus – jede der größeren Stationen ist etwa 120 Längengrade oder ein Drittel des Erdumfangs von der nächsten Station entfernt – ermöglicht es der NASA, trotz der Rotation der Erde zu jedem Zeitpunkt mit ihren verschiedenen Raumsonden in Kontakt zu treten. Die von den einzelnen Stationen empfangenen Daten des Rovers werden nach ihrem Eingang von den verschiedenen Standorten aus an das am Jet Propulsion Laboratory (JPL) befindliche Rover-Kontrollzentrum in Pasadena/Kalifornien übermittelt. In umgekehrter Richtung wird auch der Marsrover Curiosity auf diesem Weg mit den täglich für seine Forschungsmission notwendigen Kommandos oder komplexeren Informationen wie zum Beispiel den im Laufe der Zeit zu erstellenden Updates seiner Software versehen.
Die derzeit verfügbaren 70-Meter-Antennen des DSN verfügen über ein Gewicht von jeweils fast 3.000 Tonnen. Diese Antennen sind aufgrund ihrer Größe in der Lage, die Signale von Raumsonden auszumachen, welche mehr als 16 Milliarden Kilometer von unserer Erde entfernt sind. Voraussetzung hierfür ist allerdings eine absolut exakte Ausrichtung der Antennen und der damit verbundenen Transponder in Richtung der anzupeilenden Signalquelle.
Problematisch gestaltet sich dabei nicht nur immer wieder das mechanische Bewegen einer Masse von 3.000 Tonnen. Zusätzlich bieten die Antennen mit ihrer Fläche von jeweils 3.850 Quadratmetern auch eine Angriffsfläche für die örtlich vorherrschenden Windströmungen. Aufgrund ihrer stabilen mechanischen Struktur kann die 70 Meter durchmessende DSN-Antenne DSS-43 dabei zum Beispiel konstant auftretenden Windgeschwindigkeiten von bis zu 72 Kilometern pro Stunde wiederstehen. In Böen auftretende Winde können sogar Geschwindigkeiten von mehr als 88 Kilometern pro Stunde erreichen, ohne dass die Funktionalität der Anlage beeinträchtigt wird.
Mit welchen Raummissionen wird zum Beispiel die DSN-Station bei Canberra demnächst in Kontakt treten? Hier eine Übersicht über die für die nächsten Tage geplanten Aktivitäten. Die mit Curiosity vorgesehenen Verbindungen sind dabei mit dem Kürzel MSL (für Mars Science Laboratory – so lautete Curiositys frühere Bezeichnung) versehen.
Verwandte Webseiten
- NASA MSL: Telecommunication System Design (engl.)
- NASA: Data Rates / Returns (engl.)
- NASA Deep Space: 70 meter antennas (engl.)