In den Jahren 2016 und 2018 werden die europäische und die amerikanische Weltraumbehörde in zwei Etappen die Mission ExoMars zur Erkundung unseres äußeren Nachbarplaneten starten. In der zweiten Phase der Mission wird dabei auch ein von der ESA entwickelter und zu betreibender Rover zum Einsatz kommen, welcher die Oberfläche des Mars´ auf Anzeichen von ehemaligem oder gegenwärtigem Leben untersuchen soll.
Ein Beitrag von Ralph-Mirko Richter und Axel Orth. Quelle: ESA, DLR.
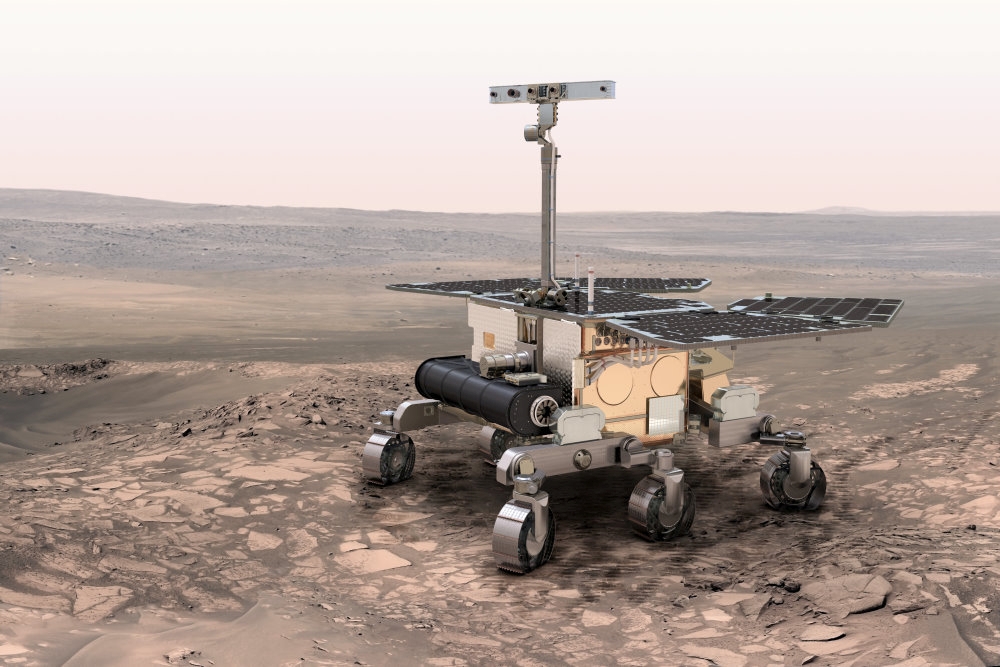
(Bild: ESA)
Eines der Aufgabengebiete der Exobiologie ist die Suche nach extraterrestrischem Leben und die Ergründung der Umweltbedingungen, welche die Entstehung und Weiterentwicklung von Leben in unserem Universum ermöglichen. Hierzu startet die Europäische Weltraumagentur ESA in den Jahren 2016 und 2018 in Kooperation mit der amerikanischen Weltraumbehörde NASA in zwei Etappen die Mission ExoMars. Im Rahmen dieser unbemannten Erkundungsmission zu unserem äußeren Nachbarplaneten wird auch ein sechsrädriger Rover zum Einsatz kommen. Im Gegensatz zu den gegenwärtig von der NASA betriebenen Marsrovern Spirit und Opportunity, welche in erster Linie auf geologische Fragestellungen spezialisiert sind, wird dieser Rover in seiner wissenschaftlichen Zielsetzung mehr auf biologische Untersuchungen ausgerichtet sein und auf dem Mars nach Anzeichen für einstiges oder sogar noch gegenwärtig existierendes Leben suchen.
Zudem sollen im Rahmen dieser zunächst auf sechs Monate ausgelegten Mission die geochemischen Bedingungen im Landegebiet des Rovers analysiert werden. Neben verschiedenen wissenschaftlichen Instrumenten kommt dabei auch erstmals in der Geschichte der Marsforschung ein Bohrer zum Einsatz, welcher Bodenproben aus einer Tiefe von bis zu zwei Metern zutage fördern und anschließend mit einem speziellen Instrumentenset analysieren wird. Der zukünftige Rover der ESA wird in etwa über die gleichen Abmessungen wie Spirit und Opportunity verfügen, welche den Mars seit dem Januar 2004 erkunden. Allerdings wird ExoMars mit einer Masse von rund 260 Kilogramm um etwa 75 Kilogramm schwerer ausfallen.
Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) ist einer der Partner in einem internationalen Konsortium, welches den ExoMars-Rover entwickelt. Neben der Ausrüstung der Rad- und Lenkantriebe für einen Testrover mit innovativen Motoren sind hierbei die Modellbildung und Simulation der Fahrdynamik sowie umfangreiche Bodentests unter marsähnlichen Geländebedingungen die Hauptaufgaben des DLR. Im Rahmen dieser Aufgabenstellung sind dabei am DLR-Institut für Raumfahrtysteme in Bremen umfangreiche Einzelradtests durchgeführt worden. Sogenannte „Full rover performance tests“, also Tests des Gesamtsystems mit Unterstützung durch Simulation, obliegen dagegen dem DLR-Institut für Robotik und Mechatronik in Oberpfaffenhofen. Zur Verbesserung der Modellierung des Rad-Boden-Kontaktes sowie zur Demonstration des Fahrverhaltens bezüglich Mobilität und Fahrdynamik des Rovers wurde dort ein spezielles Forschungslabor aufgebaut, welches auch für weitere zukünftige planetare Fahrzeuge wie zum Beispiel Mondrover, genutzt wird. Während der gegenwärtig in dieser Testanlage stattfindenden Versuche wird ein spezieller Test-Rover diversen Mars-typischen Versuchsszenarien unterworfen.
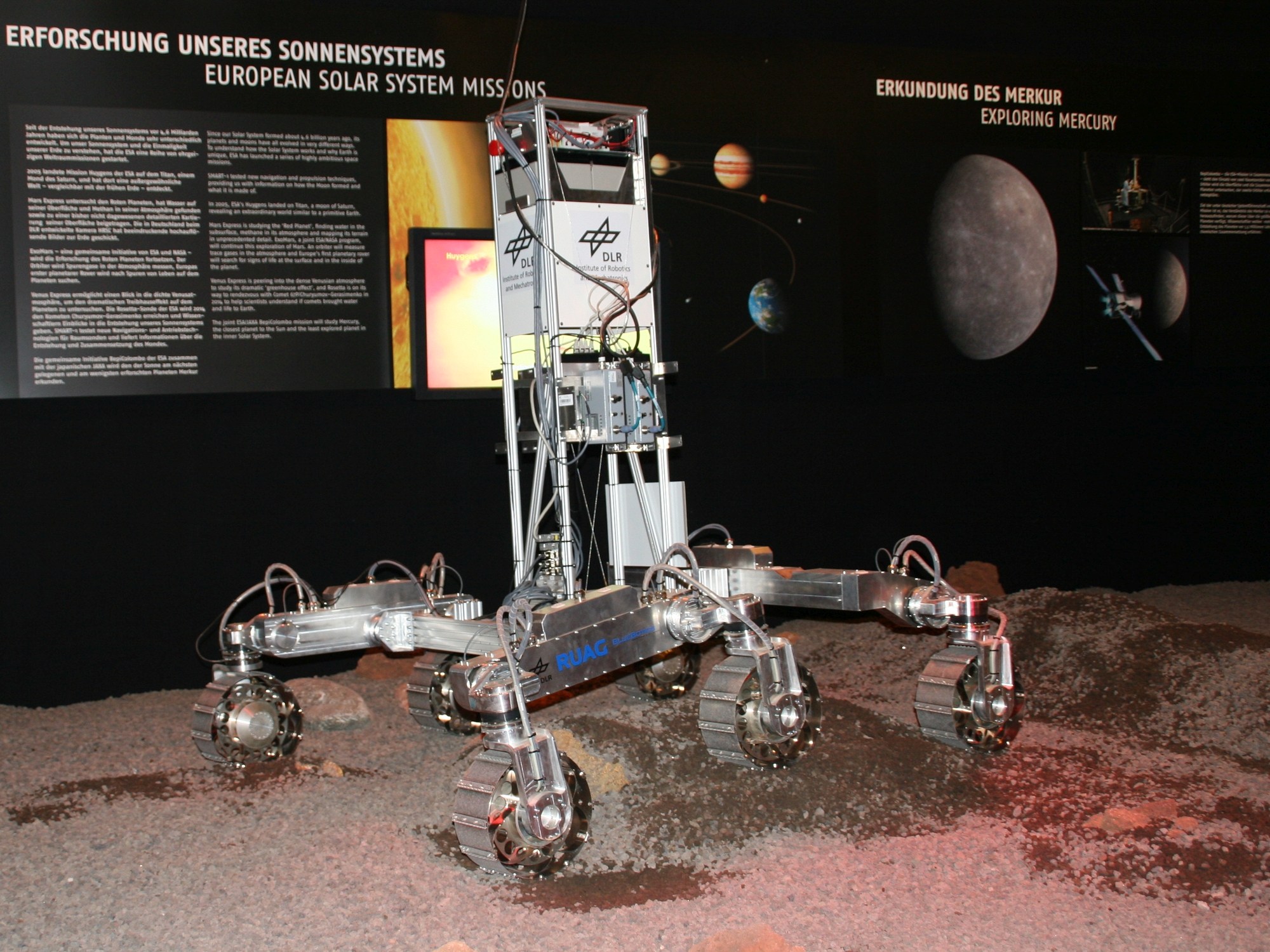
(Bild: Raumfahrer.net (R.-M. Richter))
Zu diesem Zweck wird die Testanlage mit verschiedenen sandigen und kiesigen Böden befüllt, um anschließend diverse Fahrversuche durchzuführen. Zusätzlich dienen mehrere Steine unterschiedlicher Größe und Form als Geländehindernisse, welche der Test-Rover in mehreren Fahrmodi überqueren muss. Die Aufgaben der DLR-Mitarbeiter bestehen dabei in der Charakterisierung des Geländes durch verschiedene Hardwaremessungen, der Bestimmung der Bodenparameter aus den erfolgten Messungen sowie dem Abfahren von vorgegebenen Trajektorien mit dem Testrover. Im Verlauf dieser umfassenden Experimente werden die Zustände des Rovers mit Hilfe von speziellen Messeinrichtungen erfasst.
Zum einen geschieht dies durch ein sogenanntes „Position Tracking“. Der Prüfstand wird durch mehrere Infrarot-Kameras beobachtet. An den Kameras befindliche Infrarotstrahler senden Infrarotblitze aus, die von speziell beschichteten „Markerkugeln“ reflektiert werden, welche an dem Testrover befestigt sind. Über den reflektierten Infrarotblitz wird die exakte Position des Markers berechnet. Mindestens vier Marker-Kugeln ergeben dabei ein Target (dt. Ziel), über das die Orientierung und Position des betreffenden Targets und damit des Rovers genau bestimmt wird.
Zusätzlich kann in der Anlage ein Digitales Oberflächen-Modell (DOM) errechnet werden. Aus Daten von Kameras, welche an einem beweglichen Balken über dem Prüfstand installiert sind, wird mittels eines eigens hierfür am DLR-Standort in Oberpaffenhofen entwickelten Algorithmus´ ein digitales 3D-Modell der Oberfläche berechnet. Dieses 3D-Modell kann man auch in eine spezielle Simulations-Software einbinden, mit deren Hilfe das Fahrverhalten des Rovers auf einem bestimmten Geländetyp im voraus bestimmt werden kann. Anhand der Abweichungen zwischen den Berechnungen der Software im Vorfeld einer Testfahrt und den dann real erzielten Fahrbewegungen des Testmodell wird diese Software immer weiter verfeinert.

(Bild: Raumfahrer.net (R.-M. Richter))
Eines der wesentlichen Ziele all dieser Testläufe ist es, eine zuverlässige Vorhersage über die Fahreigenschaften auf der simulierten Marsoberfläche unter allen denkbaren Unwägbarkeiten zu gewinnen. Dies geschieht in erster Linie durch den Vergleich der gewonnenen Testergebnisse mit den im Rechner simulierten fahrdynamischen Eigenschaften, wobei unter Umständen sowohl Parameter- als auch Modellanpassungen notwendig werden können.
Der derzeit beim DLR in Oberpfaffenhofen eingesetzte Testrover ist von der Kinematik und den Abmessungen her bereits nahezu identisch mit dem vorgesehenen Originalrover, welcher im Jahr 2018 zum Mars starten soll. Die sechs Räder, deren insgesamt 18 Elektromotoren (pro Rad ein Fahrmotor, ein Lenkmotor und ein zusätzlicher Motor zum Ein- und Ausschwenken des Rades) und das gesamte Fahrgestell sind also nahezu baugleich mit dem zukünftigen ESA-Rover. Auch die Abmessungen in der Horizontalen geben die Werte des zukünftigen Originals mit einer Länge von 1.610 Millimetern und einer Breite von 1.310 Millimetern in einem Maßstab von 1:1 wieder.
Die Roverplattform, das sogenannte „Chassis- und Lokomotion System“, muss in ihrer Originalversion auf dem Mars diverse Aufbauten tragen, welche aus den verschiedenen wissenschaftlichen Instrumenten, einem Mast mit dem Kamerasystem, den für die Kommunikation notwendigen Antennen, dem Bohrer und den für die Energiegewinnung nötigen Solarpaneelen bestehen. Der in Oberpfaffenhofen verwendete Testrover ist nicht mit diesen Komponenten ausgestattet, da diese nicht für die stattfindenden Tests notwendig sind. Um das Gesamtsystem des ExoMars-Rovers in seiner Testumgebung trotzdem so realitätsgetreu wie möglich nachzubilden, werden diese Aufbauten bei dem Testrover durch ein funktionsloses, aber genau ausbalanciertes Turmgestell ersetzt. Dieser „Dummy-Turm“ ist so ausgelegt, dass Gewicht und Masseschwerpunkt des Testmodells mit jenen des zukünftigen Original-Rovers übereinstimmen, was für die erfolgreiche Simulation des Fahrverhaltens wichtig ist. So kann auf diese Weise zum Beispiel die maximale Hangneigung ermittelt werden, welche der Rover befahren kann, ohne beim Passieren eines problematischen Geländes umzukippen.

(Bild: Raumfahrer.net (R.-M. Richter))
Kürzlich bekannt gewordene Informationen seitens der ESA legen nahe, dass sich die ursprünglich vorgesehene Gesamtmasse von ExoMars eventuell um weitere 40 bis 50 Kilogramm erhöhen wird. Diese Gewichtszunahme resultiert aus einer angedachten Neudefinition der wissenschaftlichen Nutzlast des Rovers. Sollten sich diese Planungen bestätigen, so wäre aller Wahrscheinlichkeit nach auch eine mehr oder weniger leichte Modifikation der konstruktiven Abmessungen des ExoMars-Rovers erforderlich. Die daraus resultierende auf das Gravitationsverhältnis von Mars zu Erde umgerechnete Gewichtszunahme von etwa 19 Kilogramm stellt aufgrund der Flexibilität des Testmodells allerdings keine Beeinträchtigung der erfolgenden Tests dar. Eine Veränderung des Masseschwerpunktes des Testrovers kann zum Beispiel durch einen Umbau des „Dummy-Turmes“ neu simuliert werden.
Im Gegensatz zu dem zukünftigen Original-Rover werden die Kommandos für die einzelnen Abschnitte der Testfahrten nicht im voraus an den Testrover übermittelt. Vielmehr erfolgt die Steuerung bei den in Oberpfaffenhofen stattfindenden Tests in Echtzeit und „auf Sicht“ und wird von den DLR-Mitarbeitern mittels eines PCs durchgeführt, welcher direkt neben dem Prüfstand steht. Der zukünftige Marsrover der ESA wird seine Kommandos dagegen, genauso wie die bisher auf dem Mars aktiven NASA-Rover, im voraus übermittelt bekommen und im Einzelfall mittels einer innovativen Software auf auftretende Probleme und unvorhergesehene Situationen eigenständig reagieren und entscheiden.
Der Grund dafür, dass die Steuerung eines Rovers auf der Marsoberfläche nicht direkt, sozusagen mittels „Joystick“, erfolgen kann, liegt in der gewaltigen Entfernung zwischen dem Mars und der Erde begründet. Abhängig von der Stellung der beiden Planeten zueinander während ihres Umlaufs um die Sonne schwankt die Entfernung von Erde und Mars im Extremfall zwischen etwa 55 Millionen und 401 Millionen Kilometern. Dadurch bedingt benötigen die Radiosignale zwischen drei und 22 Minuten, um die Distanz von bis zu 2,68 Astronomischen Einheiten zwischen den beiden Planeten zu überbrücken.
Bei den Tests zeigt sich der große Vorteil von ExoMars gegenüber den beiden Rovern der aktuellen Mars Exploration Rover-Mission und auch dem voraussichtlich Ende des Jahres 2011 zum Mars startenden nächsten NASA-Rover Curiosity: ExoMars wird im Vergleich zu diesen drei Rovern über eine deutlich verbesserte Wendigkeit und Beweglichkeit verfügen. Wie die NASA-Rover auch wird ExoMars über sechs Räder verfügen. Bei den NASA-Rovern sind jedoch lediglich die vier vorderen und hinteren Räder lenkbar, indem sie in einem Winkel von maximal 60 Grad eingeschlagen werden können. Die beiden Mittelräder sind dagegen nicht lenkbar.
(Bild: Raumfahrer.net (R.-M. Richter))
Im Gegensatz dazu wird ExoMars alle sechs Räder bis zu einem Winkel von 90 Grad einschlagen können. Durch die Möglichkeit, alle sechs Räder in einem beliebigen Winkel einzuschlagen, ist es diesem Rover möglich, sich bei Bedarf „auf der Stelle“ um sich selbst zu drehen und eventuell erforderliche Wendemanöver auf engstem Raum durchzuführen. Vergleichbare Wendemanöver der NASA-Rover können ausschließlich gegen die dann querstehenden, nicht lenkbaren Mittelräder durchgeführt werden, welche das Manöver dabei erschweren. Im Gegensatz dazu verfügt ExoMars über einen sogenannten „Ackermann Turn Mode“, in welchem den einzelnen Rädern je nach deren jeweiliger Position (Hinten, Mitte, Vorne, Links, Rechts) unterschiedliche Winkel zugeordnet werden können.
Zusätzlich kann ExoMars mit sechs im gleichen Winkel einlenkenden Rädern in einem sogenannten „Crab Mode“, vergleichbar mit der Fortbewegung einer Krabbe, seitwärts fahren. Die verschiedenen Räder sind bei einer erfolgenden Fahrt, genauso wie auch die Räder der aktuellen Mars Exploration Rover, einzeln ansteuerbar. Jedes Rad kann im Bedarfsfall in einem „Direct Drive“-Modus unabhängig von den restlichen Rädern beschleunigt, abgebremst, blockiert oder in einem unterschiedlichen Winkel in verschiedene Richtungen ausgerichtet werden.
Genauso wie auch Spirit und Opportunity wird ExoMars bei seinen Fahrten über die Oberfläche des Mars‘ lediglich eine Geschwindigkeit von maximal etwa vier Zentimetern pro Sekunde erreichen. Dies entspricht einem theoretischen Maximalwert von etwa 100 Metern pro Stunde. Realistischerweise ist aber davon auszugehen, dass ExoMars für die Überbrückung dieser 100 Meter aus Sicherheitsgründen eher einen ganzen Missionstag benötigen wird, genauso wie auch die gegenwärtigen Marsrover. Entscheidend für die täglich zu bewältigenden Distanzen sind letztendlich die Charakteristik des zu überquerenden Geländes und die zum Betrieb der Motoren zur Verfügung stehenden Energiereserven. Je komplizierter und gefahrvoller sich das zu passierende Gelände gestaltet, desto langsamer wird ExoMars fahren müssen.

(Bild: Raumfahrer.net (R.-M. Richter))
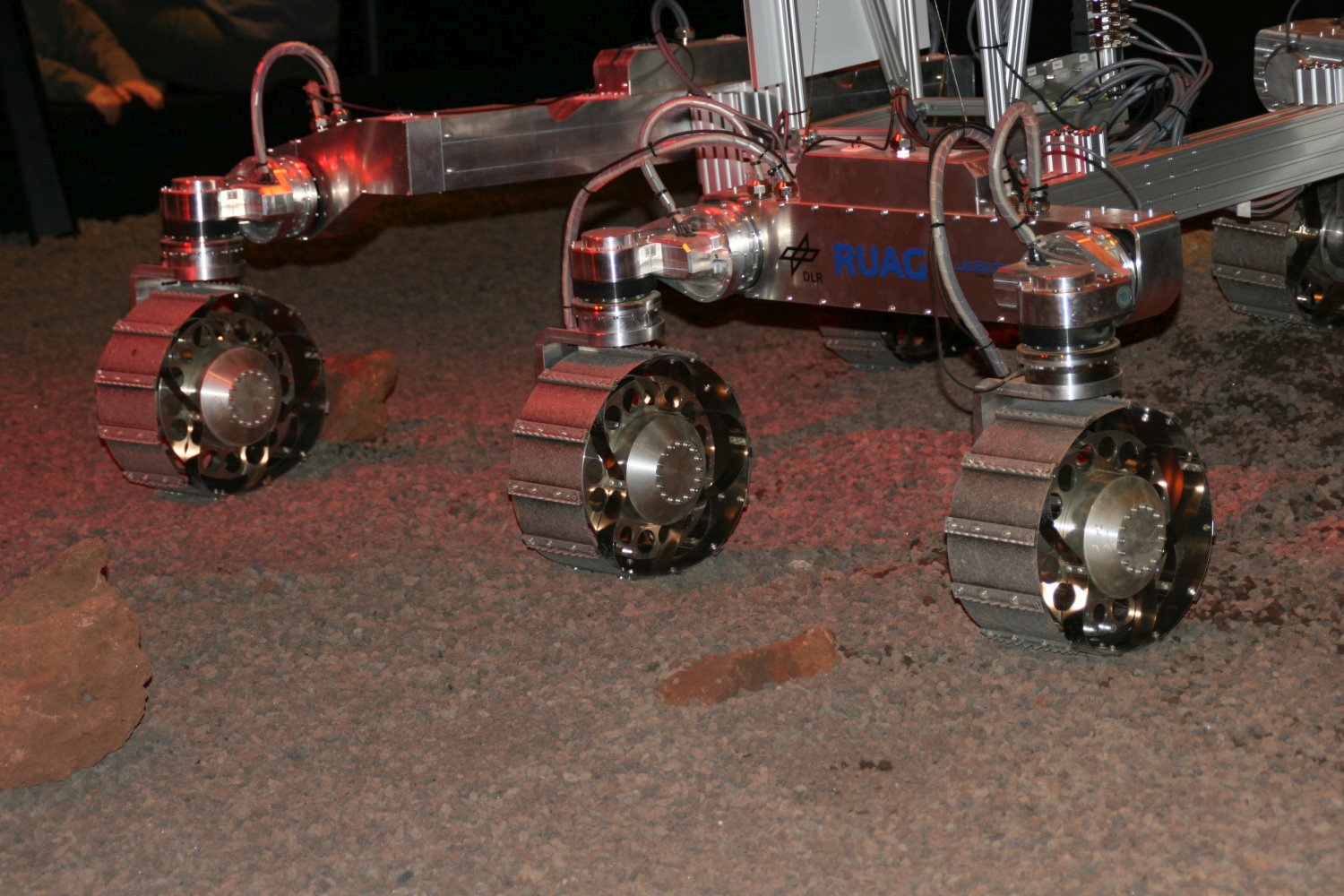
Ein weiterer Unterschied zu den bisherigen Mars-Rovern besteht im Aufbau der Räder. Im Gegensatz zu den Rädern der NASA-Rover, welche als starre, unverformbare Zylinder mit einer kleinen Oberflächenwölbung konstruiert sind, bestehen die Laufflächen der 25 Zentimeter durchmessenden Räder von ExoMars aus einem durchgehenden, flexiblen Ring, welcher durch ein raffiniert geschwungenes Metallband flexibel mit der Nabe des Rades verbunden ist. Durch das auf den Rädern ruhende Gewicht passen sich die Laufflächen der Räder dabei dem Untergrund an, so dass sich deren Aufstandsfläche deutlich vergrößert, prinzipiell ähnlich wie bei einem luftgefüllten Autoreifen. Das hat zur Folge, dass die Räder nicht so tief in einen lockeren Untergrund einsinken wie dies bei den konventioneller konstruierten bisherigen Marsrover-Rädern der Fall ist. Auch auf einem harten Untergrund sorgt die Flexibilität der Räder aufgrund der Vergrößerung der Aufstandsfläche für eine deutlich bessere Bodenhaftung. Die Bodenhaftung wird zudem durch hintereinander auf den Laufflächen und quer zur Abrollrichtung angebrachte Stege noch zusätzlich erhöht. Diese auch als „Grouser“ bezeichneten Spike-Leisten sollen ein Durchdrehen oder Wegrutschen der Räder weitestgehend verhindern.
Die Räder von ExoMars werden über eine Bodenfreiheit von 265 Millimetern verfügen. Der Abstand zwischen den Radnaben und dem Boden wird dabei, die erfolgende Raddeformation mit eingerechnet, 107 Millimeter betragen, plus weitere 158 Millimeter durch die Fahrwerkskonstruktion. Die Laufflächen der Räder sowie die Metallbänder bestehen aus Federstahl. Aufgrund der Festigkeit dieses Materials können die Bauteile dabei sehr dünn ausgelegt werden, was sich wiederum positiv auf das Masseverhältnis der Räder auswirkt. Da die Marsatmosphäre lediglich über einen vernachlässigbaren Anteil von 1.300 ppm Sauerstoff verfügt und mit einem Wasserdampfgehalt von 210 ppm zudem extrem trocken ausfällt, ist hierbei nicht mit Korrosionsproblemen zu rechnen. Die Spike-Leisten wurden aufgrund der zu erwartenden hohen Beanspruchung während des Fahrbetriebes aus einer Titan-Aluminium-Legierung hergestellt.
(Bild: Raumfahrer.net (R.-M. Richter))
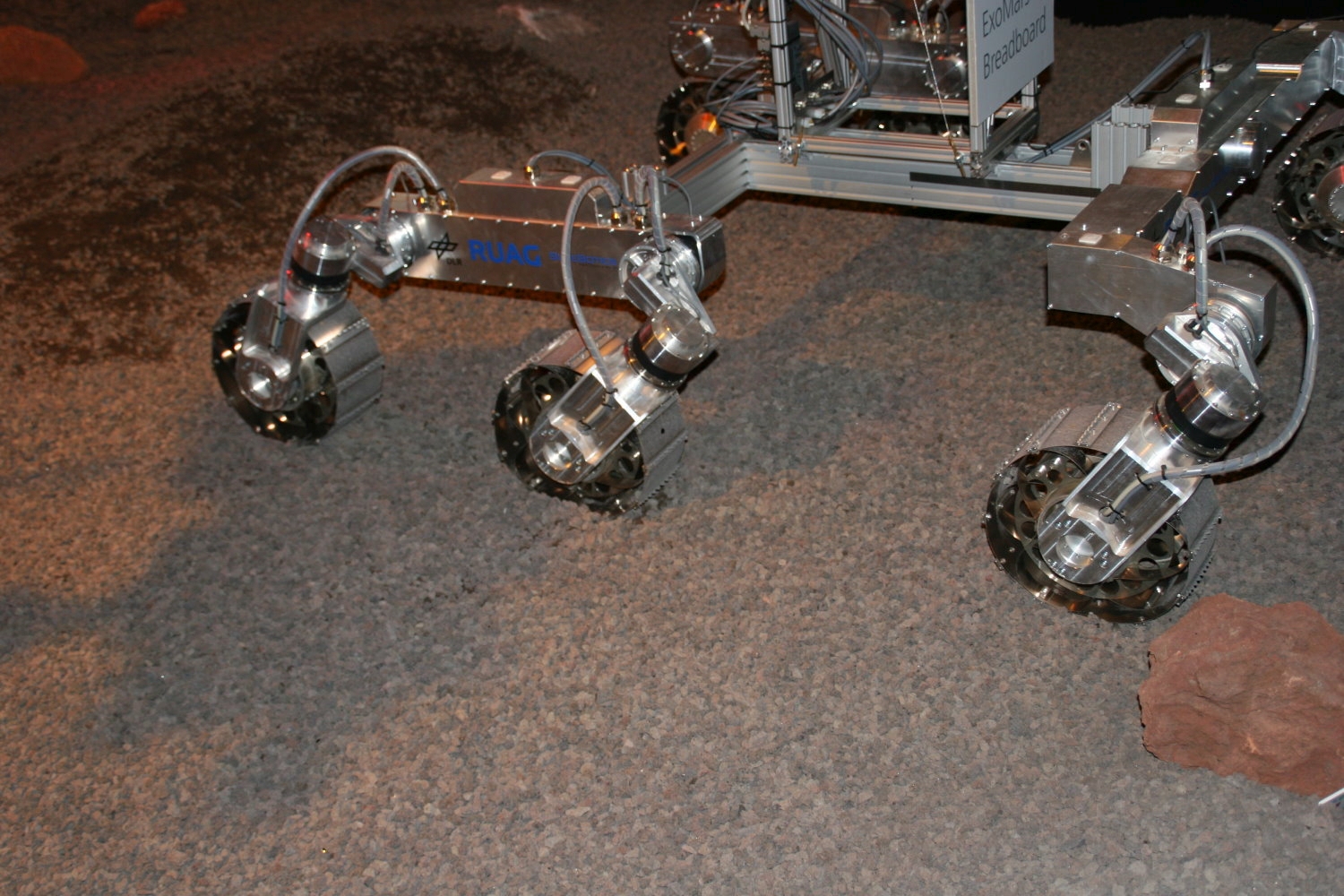
Durch diese neuartige Radkonstruktion, welche übrigens in Zukunft auch in speziellen Einsatzgebieten auf der Erde zum Einsatz gebracht werden soll, verringert sich die Gefahr, dass sich der zukünftige Marsrover der ESA im lockeren Sand des Mars´ festfahren wird. Sollte dies aber trotzdem geschehen, so wird ExoMars zusätzlich über eine bisher einmalige Möglichkeit der Selbstbefreiung verfügen. Wie die NASA-Rover auch verbringt ExoMars den Flug zu unserem Nachbarplaneten aus Gründen der Platzersparnis mit dicht an das Chassis geklappten Rädern. Nach der erfolgreichen Landung auf dem Mars müssen die Räder erst in ihre Arbeitspositionen ausgeschwenkt werden. Anders als bei den NASA-Rovern werden die Räder aber nicht dauerhaft in dieser Fahr-Stellung arretiert, sondern jedes einzelne Rad kann theoretisch auch weiterhin bei Bedarf um eine horizontale Achse in eine beliebige Stellung geschwenkt werden. Die genauen Parameter für den Umfang dieser Schwenkbewegung sind bisher noch nicht endgültig definiert. Nach dem momentanen Stand ist diese Bewegung aufgrund von Softwareanschlägen bei den beiden mittleren Rädern auf plus 100 Grad bis minus 30 Grad und bei den vier äußeren Rädern auf minus 140 Grad bis plus 30 Grad begrenzt.
Diese als „Wheel Walking Mode“ bezeichnete Schwenkbewegung wird über den dritten Aktuator eines jeden Rades gesteuert, welcher im Rahmen der Mission wohl wahrscheinlich am wenigsten beansprucht werden wird, aber trotzdem ganz neue und bisher nicht vorhandene Möglichkeiten birgt. Speziell der seit dem Frühjahr 2009 im Marssand festgefahrene NASA-Rover Spirit hätte die damit verbundenen zusätzlichen Fähigkeiten der Fortbewegung sehr gut gebrauchen können. Zum einen wird ExoMars durch die Schwenkmotoren über die Fähigkeit verfügen, auf primitive Weise zu „laufen“ statt ausschließlich zu „rollen“. Mit sechs „Beinen“ ist dabei der Modus einer Schreitbewegung möglich. Sollte ExoMars sich einmal in einer Sanddüne festgefahren haben, so könnte der Rover ein Rad nach dem anderen anheben, je nach Bedarf nach vorne oder hinten bewegen und anschließend wieder auf der Oberfläche absetzen. Ergänzt durch zusätzlich erfolgende unterstützende Drehbewegungen der restlichen Räder könnte ExoMars auf diese Weise wieder festen und sicheren Untergrund erreichen. Und selbst mit mehreren ausgefallenen Fahrmotoren könnte sich der Rover zur Not im dauerhaften „Schreitmodus“ in Richtung auf sein nächstes Forschungsziel fortbewegen.
(Bild: Raumfahrer.net (R.-M. Richter))
Ein weiterer nicht zu unterschätzender Vorteil dieser Bewegungsmöglichkeit der Räder besteht darin, dass ExoMars auf diese Weise auch Höhenunterschiede im zu passierenden Gelände ausgleichen kann. Sollte sich der Rover zum Beispiel parallel zu einem Hang bewegen, so können die Räder auf der einen Roverseite abgesenkt werden. Durch eine auf diese Art erreichte bewusste Anpassung von Höhe und Winkel in Bezug auf die lokale Oberfläche von ExoMars kann die Neigung des Rovers gezielt verringert werden. Dadurch wird es dem Rover möglich sein, sich auch durch relativ unebenes Gelände zu bewegen und somit Orte auf der Marsoberfläche zu erreichen, an welche die Rover der NASA nicht vordringen könnten. Außerdem ist es natürlich auch möglich, die Gesamtneigung der Roverplattform bewusst zu verändern, um etwa wissenschaftliche Untersuchungen zu unterstützen oder um besser auf den Boden unterhalb des Rovers blicken zu können.
Eine weitere Option ergibt sich zudem in Bezug auf den Energiehaushalt des Rovers. Wie auch die beiden Marsrover Spirit und Opportunity wird ExoMars die für seinen Betrieb erforderliche Energie während der Mission auf der Planetenoberfläche ausschließlich mittels seiner Solarzellen aus Sonnenenergie gewinnen. Bei einem niedrigen Sonnenstand im Marswinter wird ExoMars, anders als diese beiden aktuellen Marsrover, es dadurch auch nicht so früh nötig haben, sich zum Überwintern zu einem in Richtung auf die Sonne geneigten Berghang zu bewegen und dort den nächsten Frühling mit dem damit verbundenen höheren Sonnenstand und einer dadurch bedingten höheren täglichen Energieausbeute abzuwarten. Vielmehr könnte er sich durch ein gezieltes Absenken der einen Roverseite einfach selbst in Richtung auf die Sonne neigen, auf diese Weise das einfallende Sonnenlicht besser ausnutzen, und dadurch letztendlich auch im Marswinter länger mobil bleiben.
Diese Option erweitert theoretisch auch das zukünftige Einsatzgebiet des Rovers. Unter anderem aufgrund der zu erwartenden Sonnenlichteinstrahlung wurden für Spirit und Opportunity lediglich Landegebiete ins Auge gefasst, welche sich in einem Bereich von 15 Grad südlich bis 10 Grad nördlich des Marsäquators befinden. ExoMars könnte dagegen theoretisch auch in höheren marsianischen Breiten eingesetzt werden.
Raumfahrer.net bedankt sich hiermit bei den Mitarbeitern der Planetaren Explorationsgruppe im Institut für Robotik und Mechatronik im DLR-Standort Oberpfaffenhofen, welche während der Internationalen Luft- und Raumfahrtausstellung 2010 in Berlin die Zeit gefunden haben, die Funktionsweise der Räder und des Fahrwerks des zukünftigen Marsrovers der ESA und die damit verbundenen Simulationen und Tests eingehend zu erläutern.