Bevor der Marsrover Curiosity seine Untersuchungen auf der Marsoberfläche beginnen kann, muss er zuerst einmal unseren äußeren Nachbarplaneten erreichen. Dabei wird er von einem Flugmodul gesteuert und von einem kapselförmigen Schutzschild vor den Einflüssen des Weltalls geschützt.
Ein Beitra von Ralph-Mirko Richter. Vertont von Peter Rittinger.
(Bild: NASA, JPL-Caltech)
Nach der Beendigung der Endmontage und dem Abschluss der finalen Tests wurde der Marsrover Curiosity am 22. Juni 2011 mit einem Transportflugzeug der U.S. Air Force vom Jet Propulsion Laboratory (JPL) der NASA zum Kennedy Space Center der NASA in Florida befördert. Von dort aus startete Curiosity am 26. November 2011 um 16:02 MESZ an der Spitze einer Trägerrakte vom Typ Atlas V (541) und begann seine mehr als acht Monate andauernde Reise zum Mars (Raumfahrer.net berichtete).
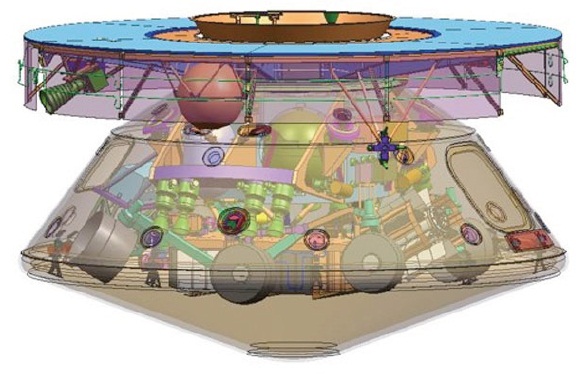
Der Rover und die für die Landung auf der Marsoberfläche benötigte Abstiegsstufe sind während der Flugphase zum Mars durch eine Kapsel, den „Aeroshell“, vor den unwirtlichen Einflüssen des Weltraumes – den niedrigen Temperaturen und der im Weltraum auftretenden Strahlung – geschützt. Am unteren Ende der Kapsel befindet sich der Hitzeschild, welcher die Abstiegsstufe und den Rover während der ersten Minuten nach dem Eintritt in die Marsatmosphäre vor den dabei auftretenden Temperaturen abschirmt. Am oberen Ende der Kapsel befindet sich dagegen ein Flugmodul, die so genannte „Cruise Stage“, welches für die Steuerung auf dem Weg zum Mars verantwortlich ist.
Die Cruise Stage
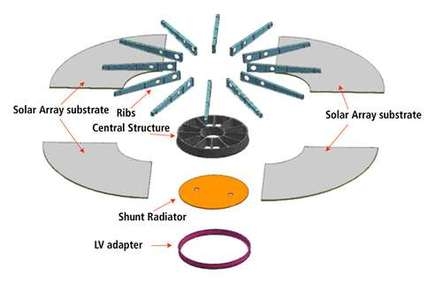
Auf dem 567 Millionen Kilometer weiten Weg bis zum Erreichen unseres äußeren Nachbarplaneten wird Curiosity durch ein Flugmodul (engl. „Cruise Stage“) gesteuert. Dieses etwa vier Meter durchmessende Modul verfügt einschließlich des für die bis zu sechs vorgesehenen Kurskorrekturmanöver mitgeführten Treibstoffes über ein Gesamtgewicht von 539 Kilogramm. Das ringförmige Modul besteht aus einer zentralen Aluminiumstruktur und wird durch mehrere rippenförmige Verstrebungen mechanisch stabilisiert. Auf der Oberfläche des Moduls sind insgesamt 12 Solarzellen montiert, welche den Komplex auf dem Weg zum Mars mit Energie versorgen sollen. Noch kurz vor dem Erreichen des Mars sollen die Solarzellen dabei in einer Entfernung von knapp 1,6 Astronomischen Einheiten zur Sonne mit einer Effizienz von erwarteten 28,5 Prozent ein Minimum von einem Kilowatt elektrischer Leistung generieren können. Zusätzlich sind mehrere Lithium-Ionen-Batterien vorhanden, auf deren gespeicherte Energiereserven im Bedarfsfall zurückgegriffen werden kann. Des weiteren ist das Modul mit den Akkumulatoren der Abstiegsstufe und dem Energieversorgungssystem des Rovers verbunden.
Das der MMRTG des Rovers auch bereits während der Flugphase eine große Menge an Wärmeenergie abgibt, muss diese Wärme aus dem Inneren der Cruise Stage abgeführt werden, um eine Überhitzung der Systeme zu verhindern. Aus diesem Grund ist das Flugmodul mit zehn Radiatoren ausgestattet, welche die überschüssige Wärme in den Weltraum ableiten. Mittels eines komplexen Rohrleitungssystems und einer Pumpe können einige der elektronischen Bauteile der Cruise Stage im Bedarfsfall jedoch auch gezielt beheizt werden, um diese Elemente vor Kälteschäden zu schützen. Für die Ermittlung der aktuell vorherrschenden Temperaturen im Inneren der Cruise Stage und die sich aus diesen Werten ergebende eventuell erforderliche Wärmeregulierung sind mehrere Temperatursensoren vorhanden. Als passive Schutzmaßnahme vor zu niedrigen Temperaturen ist das Innere des Flugmoduls zusätzlich mit diversen Isolationsmatten ausgestattet.
Während des Fluges zum Mars wird die Raumsonde in eine leichte Rotationsbewegung versetzt. Durch diese Spinstabilisierung, welche mit einer Rate von etwa zwei Umdrehungen pro Minute erfolgt, behält die Raumsonde während der Flugphase ihre vorgesehene Orientierung im Raum bei. Die Ermittlung der korrekten Ausrichtung im Weltraum erfolgt dabei durch den Einsatz eines Sternsensors und eines zusätzlichen Sonnensensors. Letzterer ermittelt dabei die Position der Sonne im Weltraum, ersterer zeichnet dagegen die Positionen von verschiedenen, zuvor als „Leitsterne“ festgelegten Fixsternen auf. Durch einen Abgleich der ermittelten Positionen der Sterne im Raum relativ zur Raumsonde kann dabei die Orientierung von Curiosity ermittelt und gegebenenfalls korrigiert werden. Zwecks einer größeren Sicherheit während der Transferphase zum Mars ist das gesamte für die Lagekontrolle zuständige System redundant ausgelegt. Diese Redundanz schützte Curiosity allerdings nicht vor dem Auftreten eines Problems, welches bereits Ende November 2011 durch einen Fehler in der Navigationssoftware ausgelöst wurde. Dieser Fehler konnte allerdings Anfang Februar 2012 durch ein entsprechendes Update der Software behoben werden (Raumfahrer.net berichtete).

(Bild: Credit: NASA, JPL-Caltech, Lockheed Martin)
Bahnkorrekturmanöver
Für die Durchführung der bis zu sechs auf dem Weg zum Mars vorgesehenen Bahnkorrekturmanöver (engl. „Trajectory Correction Maneuver“, kurz „TCM“) verfügt die Cruise Stage über insgesamt acht Manövertriebwerke, welche mit dem Treibstoff Hydrazin betrieben werden. Durch exakt aufeinander abgestimmte Zündungen der einzelnen Triebwerke kann die Raumsonde im Rahmen eines zu absolvierenden TCMs dabei sowohl die Flugrichtung als auch die Geschwindigkeit verändern. Das Hydrazin ist im Inneren der Cruise Stage in zwei kugelförmigen Tanks gelagert, welche aus einer Titanlegierung bestehen.
Der Aeroshell
Die über 4,5 Meter durchmessende, knapp drei Meter hohe und 731 Kilogramm schwere Kapsel (engl. „Aeroshell“) des Rovers wurde von der Firma Lockheed Martin hergestellt. Die Aufgabe des Aeroshell besteht einerseits darin, den Rover und die Abstiegsstufe während des Fluges zum Mars vor den widrigen Bedingungen des Weltraums zu schützen. Außerdem wird der Schild den Rover auch während der ersten Phase des Eintritts in die Marsatmosphäre vor den dabei auftretenden Bedingungen abschirmen. Während der EDL-Phase – dem Eintritt in die Marsatmosphäre, dem Abstieg und der Landung – dient der obere Teil der Kapsel, der 349 Kilogramm schwere, so genannte „Backshell“ jedoch in erster Linie der Lageregelung während des Abstieges. Zu diesem Zweck ist die Kapsel mit ebenfalls acht Lagekontrolltriebwerken ausgestattet, welche paarweise angeordnet sind. Die Triebwerke entwickeln einen Schub von etwa 267 Newton und werden ausschließlich zur Kontrolle der Rotation und der Ausballanzierung der Ausrichtung genutzt. Dabei erzeugen sie jedoch keinerlei aktive Bremswirkung. Des weiteren beherbergt die Kapsel verschiedenen Kontrollgewichte, welche während der Abstiegsphase kontrolliert abgestoßen werden. Durch das Abstoßen der Gewichte wird die exakte Ausrichtung des Rovers während des Abstieges gewährleistet.
Die bikonisch geformte Struktur des Backshell ist in einer Wabenkernbauweise ausgeführt, wobei die verwendeten Platten aus einem kohlenstofffaserverstärktem Graphit-Epoxid-Verbundstoff durch eine Aluminium-Wabenkernstruktur gestützt werden. Die Oberfläche des Backshell bildet ein dünner, ablativer Hitzeschild.
Der Fallschirm
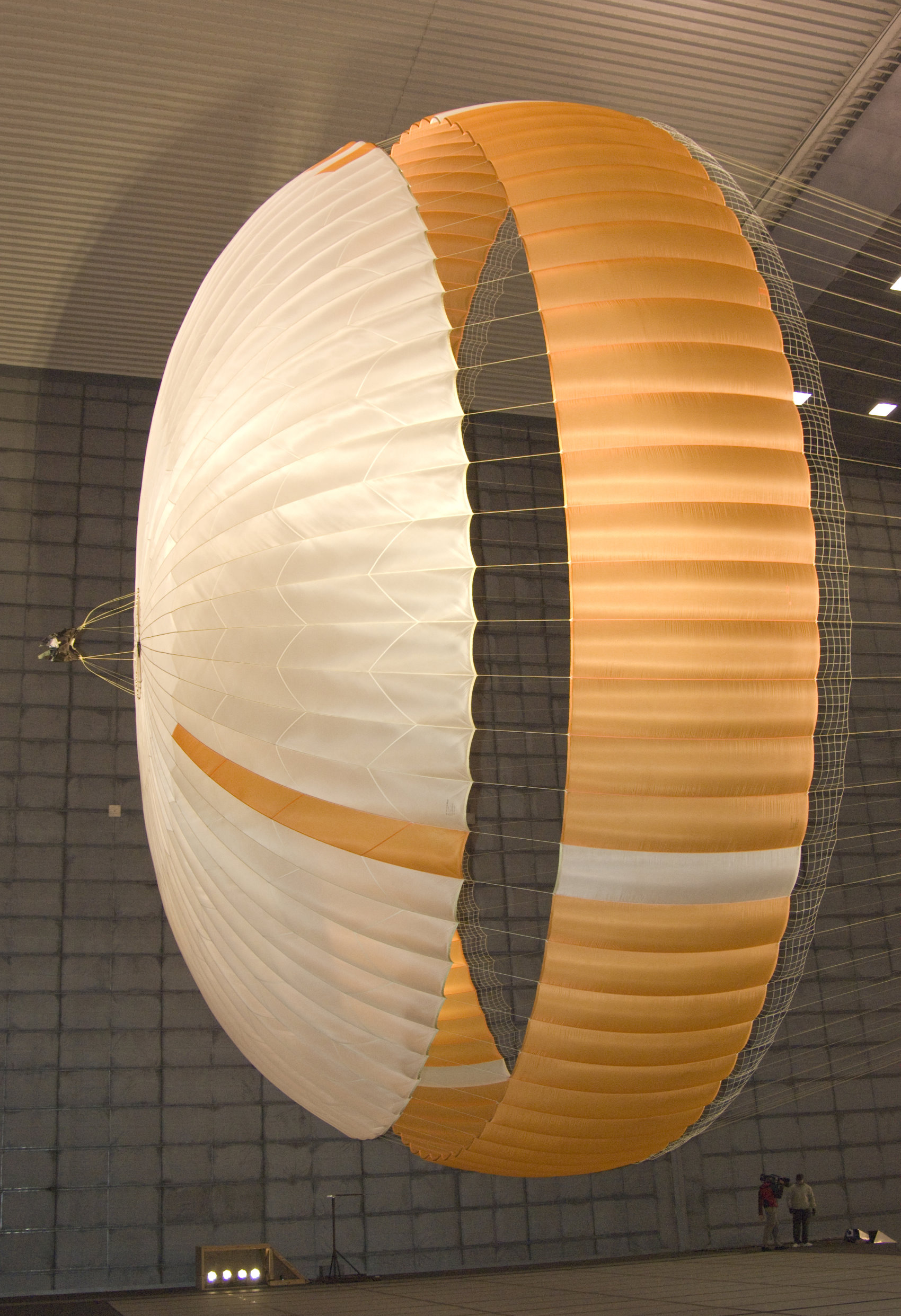
(Bild: NASA, JPL-Caltech)
Des weiteren beherbergt der Aeroshell an seinem oberen Ende einen Behälter. In diesem befindet sich ein Fallschirm, welcher der Abbremsung des Gefährtes in der unteren Schicht der Marsatmosphäre dienen wird. Der Bremsfallschirm ist mit 80 Befestigungsseilen – jedes verfügt über eine Länge von 45,7 Metern – mit dem Aeroshell verbunden. Mit einem Durchmesser von fast 16 Metern und einem Gewicht von rund 54 Kilogramm fällt der von der Firma Pioneer Aerospace in South Windsor/Connecticut entwickelte Fallschirm von Curiosity um etwa 10 Prozent größer aus als die Fallschirme, welche bei den Landungen der beiden Vorgängermissionen Spirit und Opportunity im Januar 2004 verwendet wurden. Es handelt sich somit um den größten Fallschirm, welcher bisher bei der Landung auf einem fremden Planeten zu Einsatz kam. Curiositys Fallschirmhalterung ist flexibel konstruiert und kann so die Bewegung und die Vibrationen des Landefallschirms bis zu einem gewissen Maß ausgleichen. Planmäßig wird der Fallschirm, welcher hauptsächlich aus Nylon und Polyester besteht, beim Unterschreiten der Mach-2-Grenze entfaltet und entwickelt eine Bremskraft von bis zu 289 kN.
Der Hitzeschild
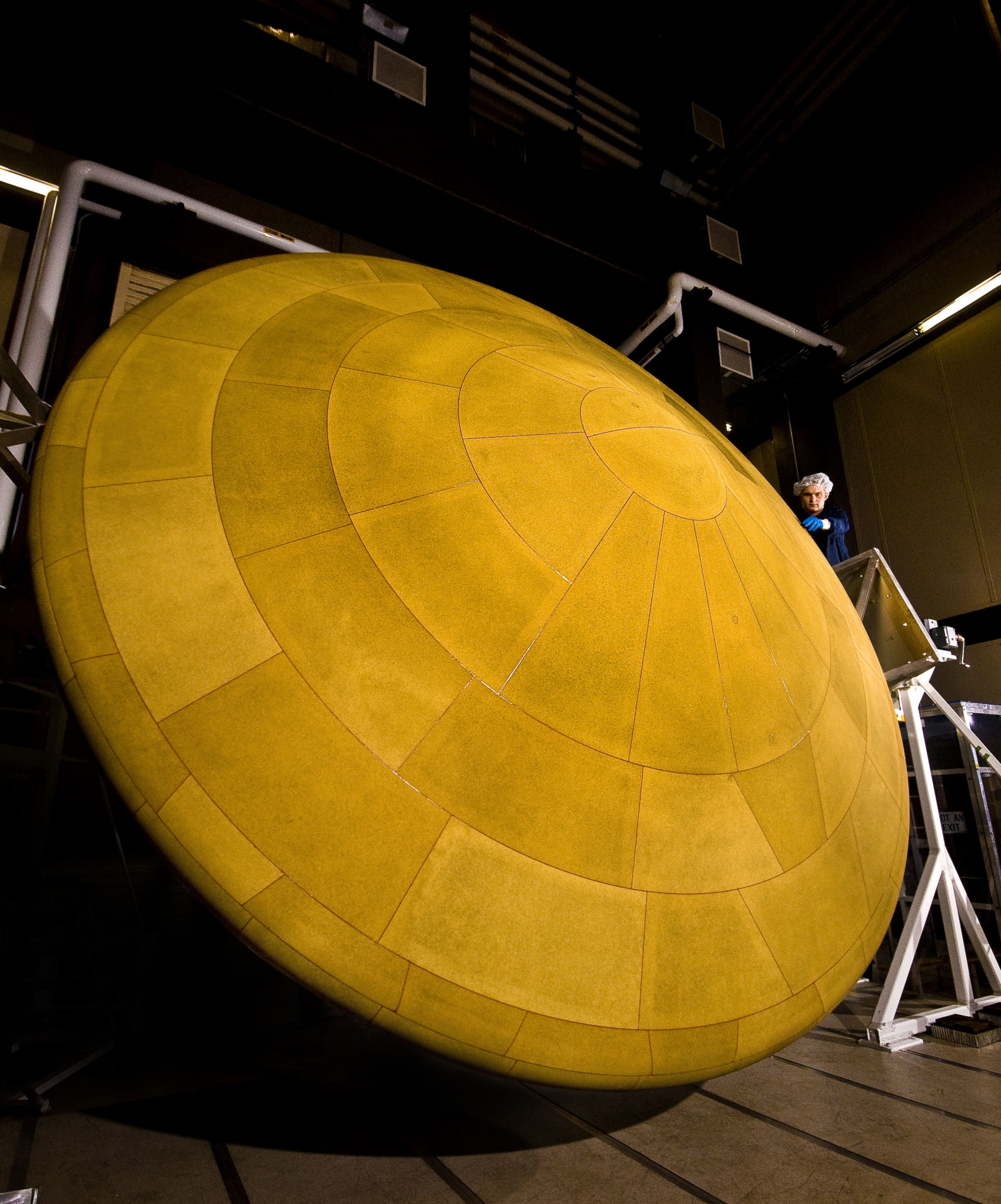
Den unteren Teil des Aeroshell bildet ein 382 Kilogramm schwerer ablativer Hitzeschild, welcher den Rover und dessen Abstiegsstufe während des Eintritts in die Marsatmosphäre und der ersten Phase des Abstieges vor den dabei auftretenden Temperaturen von bis zu etwa 2.100 Grad Celsius schützen wird. Mit einem Durchmesser von 4,57 Metern handelt es sich hierbei um den größten Hitzeschild, welcher bisher im Rahmen einer Planetenmission verwendet wurde. Die für den Schild verwendeten Kacheln sind mit einer etwa 2,5 Zentimeter dicken Schicht aus einem Material überzogen, welches als Phenolic Impregnated Carbon Ablator (kurz „PICA“) bezeichnet wird.
PICA basiert auf einer Kohlenstoff-Phenol-Verbindung, welche über ein besonders gutes Verhältnis von der erreichten Schutzwirkung gegenüber dem auftretenden Gewicht verfügt. Das Material wurde bereits in den 1990er Jahren vom Ames Research Center entwickelt und kam am 15. Januar 2006 bei der Landung der Rückkehrkapsel der Kometenmission Stardust erfolgreich zum Einsatz.
Der Hitzeschild von Curiosity ist so konzipiert, dass er einer thermischen Belastung von 216 Watt pro Quadratzentimeter, einer mechanischen Scherung von bis zu 540 Pascal und einem beim Durchqueren der Atmosphäre auftretenden Staudruck von etwa 37 Kilopascal wiederstehen kann. In den Schild wurden die 14 Sensoren des MEDLI-Suite integriert, welche während des Eintritts in die Marsatmosphäre und bei deren Durchquerung Druck- und Temperaturdaten sammeln sollen.
Die Kommunikation während des Fluges und der Abstiegsphase
Für die Kommunikation während des Fluges zum Mars und für die Übertragung von Telemetriedaten während des Abstieges durch die Marsatmosphäre sind verschiedenen Antennen vorgesehen. Die Cruise Stage verfügt hierfür über eine „Medium Gain Antenna“ kurz („MGA“). Diese Hornantenne muss aufgrund ihrer mittelstark ausgeprägten Richtwirkung beim Senden und Empfangen von Daten grob in die Richtung auf die Erde ausgerichtet sein. Bei einer optimalen Ausrichtung erreicht die MGA einen Antennengewinn von etwa 18 Dezibel. Der Sendebetrieb erfolgt im Sendemodus bei einer Frequenz von 8401 MHz mit einer Datenrate von bis zu 10 kBit/s. Der Empfang findet bei 7151 MHz statt, wobei die Übertragungsrate bei etwa 1,1 kBit/s liegt.
Auch der Aeroshell ist mit mehreren Antennen versehen, welche sich im Bereich der Fallschirmhalterung befinden. Für die Kommunikation im Frequenzbereich des X-Bandes sind zwei baugleiche Antennen, die „Parachute Low Gain Antenna“ (kurz „PLGA“) und die „Tilted Low Gain Antenna“ (kurz „TLGA“) vorgesehen. Beide Antennen unterscheiden sich lediglich durch die Positionen, an welcher sie an der Struktur befestigt sind. Sie sind so angeordnet, dass jede der Antennen den „toten Winkel“ der anderen Antenne ausfüllen kann. Die Richtwirkung der PLGA und der TLGA ist sehr gering, so dass im Betriebsmodus keine exakte Ausrichtung in Richtung auf die Erde notwendig ist. Dies hat allerdings zur Folge, dass die erreichbaren Datenübertragungsraten eher gering ausfallen. Zu Beginn des Fluges zum Mars konnten in der Nähe der Erde Daten noch mit 1,1 kBit/s empfangen und mit 11 kBit/s gesendet werden. Mit zunehmender Entfernung zur Erde sinkt die Datenrate jedoch kontinuierlich bis auf lediglich wenige Dutzend Bits pro Sekunde ab. Der Antennengewinn beider Antennen schwankt zwischen 1 und 5 Dezibel, da es durch die Fallschirmhalterung zu erheblichen Reflektionseffekten kommen kann.
Während der ersten Landephase des Marsrovers findet die Kommunikation im UHF-Bereich über die „Parachute UHF Antenna“ (kurz „PUHF“) statt. Hierbei handelt es sich um einen Komplex von insgesamt acht kleinen Patchantennen welche an der äußeren Verkleidung des Fallschirmbehälters montiert sind. Durch die kreisförmige Anordnung der einzelnen PUHF-Antennen ergibt sich ein im Vergleich zu der PLGA und der TLGA ein sehr stabiles und in alle Richtungen effektiv nutzbares Sendeverhalten. Somit können auch bei dem sehr turbulenten Flug durch die Atmosphäre unseres Nachbarplaneten Telemetriewerte mit einer ausreichenden Geschwindigkeit übertragen werden. Der Antennengewinn der PUHF liegt zwischen minus fünf und plus fünf Dezibel, wobei eine Datenrate von mindestens 8 kBit/s erreicht werden wird.
Die Abstiegsstufe
Eingekapselt in den Aeroshell befinden sich der eigentliche Rover und die für dessen letzten Phasen der Landung benötigte, einschließlich des mitgeführten Treibstoffes 1.219 Kilogramm schwere Abstiegsstufe Curiositys. Nach der Abtrennung des Hitzeschildes, des Backshells und des Landefallschirms – letztere findet in einer Höhe von etwa 1.800 Metern über der Marsoberfläche statt, erfolgt die weitere Abbremsung ausschließlich durch die acht Manövriertriebwerke der Abstiegsstufe, welche zur Ermittlung der exakten Entfernung zur Oberfläche über ein an einem Ausleger montiertes Radarsystem verfügt. Die letzte Phase der Landung erfolgt schließlich durch den „Sky Crane“, welcher Curiosity auf den letzten Metern bis zum Erreichen der Oberfläche abseilen wird.
Auch die Abstiegsstufe mit einem eigenständigen Kommunikationssystem versehen. Für die Kommunikation im X-Band steht ein als „Small Deep Space Transponder“ (kurz „SDST“) bezeichneter Transmitter zur Verfügung, welcher auf der Technik der beiden Rover Spirit und Opportunity basiert. Die Datenübertragungsrate des SDST wird durch die Elektronik in Abhängigkeit von der Signalqualität automatisch eingestellt und kann zwischen acht und 4.000 Bit pro Sekunde liegen. Des weiteren verfügt die Abstiegsstufe über eine „Descent Low Gain Antenna“ (kurz „DLGA“) und eine „Descent UHF Antenna“ (kurz „DUHF“), mit denen die während des Atmosphärenabstieges gesammelten Telemetriewerte an die beiden NASA-Marsorbiter Mars Reconnaissance Orbiter und Mars Odyssey sowie an den ESA-Orbiter Mars Express übermittelt werden sollen. Ein Teil der Daten wird auch auf direktem Weg an das Deep Space Network (DSN) der NASA übertragen und von den DSN-Stationen bei Canberra/Australien empfangen werden.