Am vergangenen Sonntag hat der Marsrover Curiosity erstmals seinen Bohrer auf einen Stein aufgesetzt. Vor dem Beginn des eigentlichen Bohrvorganges sind allerdings noch verschiedene Untersuchungen nötig, welche sich über einen Zeitraum von mehreren Tagen erstrecken werden.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS.
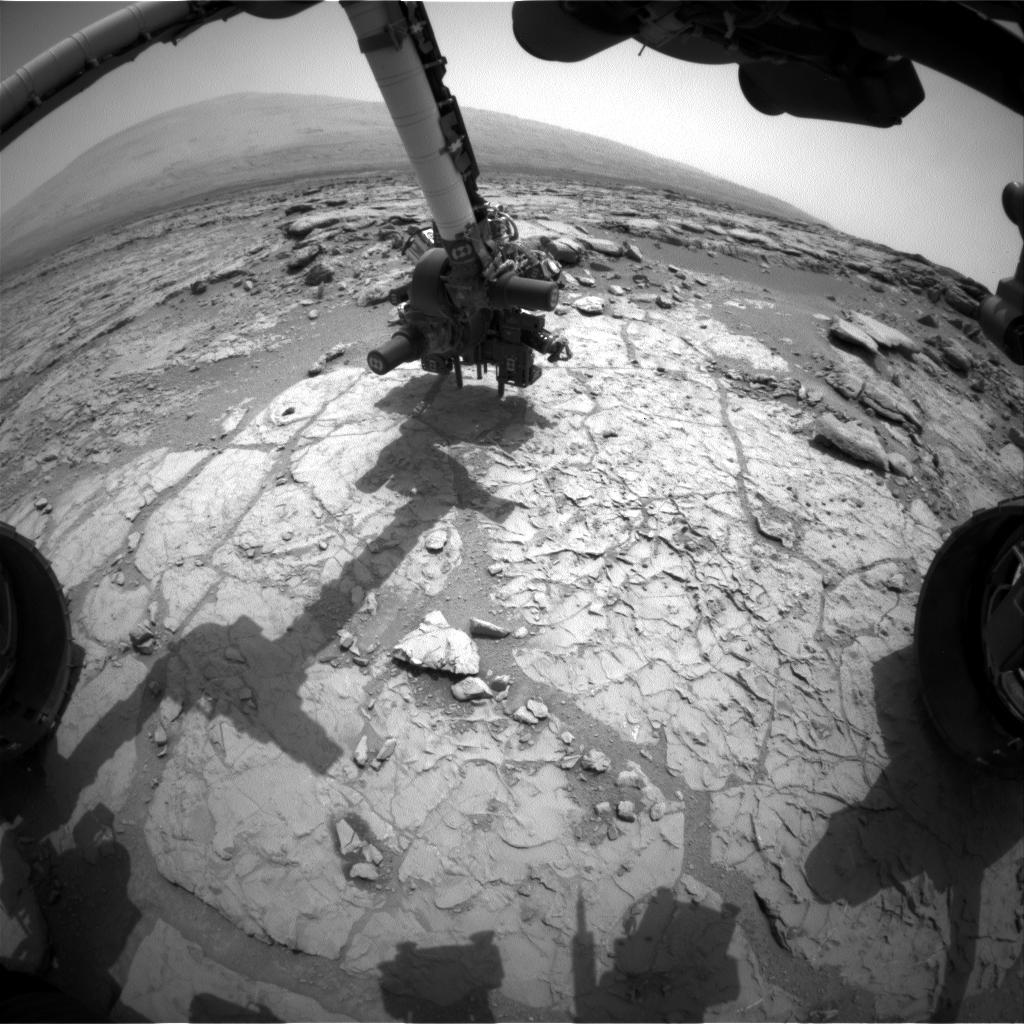
(Bild: NASA, JPL-Caltech)
Bereits seit Anfang Dezember 2012 befindet sich der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity in der Region „Yellowknife Bay“. Speziell der nordwestliche Bereich dieser seichten Vertiefung innerhalb des Gale-Kraters, des Operationsgebietes des Rovers, wurde seitdem ausführlich mit den diversen wissenschaftlichen Instrumenten des Rovers untersucht. Hier soll in den kommenden Tagen auch erstmals Curiositys Gesteinsbohrer zum Einsatz kommen (Raumfahrer.net berichtete).
Dieses „Powder Acquisition Drill System“ (kurz „PADS“) kann mittels eines Schlagbohrmechanismus 1,6 Zentimeter durchmessende und bis zu fünf Zentimeter tiefe Löcher in die Marsoberfläche oder in die dort befindlichen Gesteine bohren. Das im Rahmen eines solchen Bohrvorganges pulverisierte Marsgestein kann anschließend durch die verschiedenen Analyseinstrumente des Rovers eingehend untersucht werden. Zur Vorbereitung dieser ersten Bohrung wurde der hierfür ausgewählte Bereich der Marsoberfläche, es handelt sich um eine flache Formation aus offen zutage liegenden Grundgestein, während der vergangenen Tage ausführlich mit dem APX-Spektrometer, der Mikroskopkamera MAHLI und der ChemCam analysiert und mehrfach abgebildet.
Vorsichtige Vorgehensweise
Am vergangenen Sonntag wurde dann auch erstmals der Bohrer auf der Marsoberfläche platziert und mit Druck gegen die dort gelegene Gesteinsformation gepresst. Durch die so erzeugten Bedingungen wurden Kräfte entwickelt, welche auch in etwa bei einer tatsächlich erfolgenden Bohrung erzeugt werden. Die an der Mission beteiligten Ingenieure wollten durch diesen „Pre-Load“-Test ermitteln, ob die Kräfte, welche dabei auf den Instrumentenarm des Rovers einwirken, ihren vorherigen Berechnungen entsprechen.
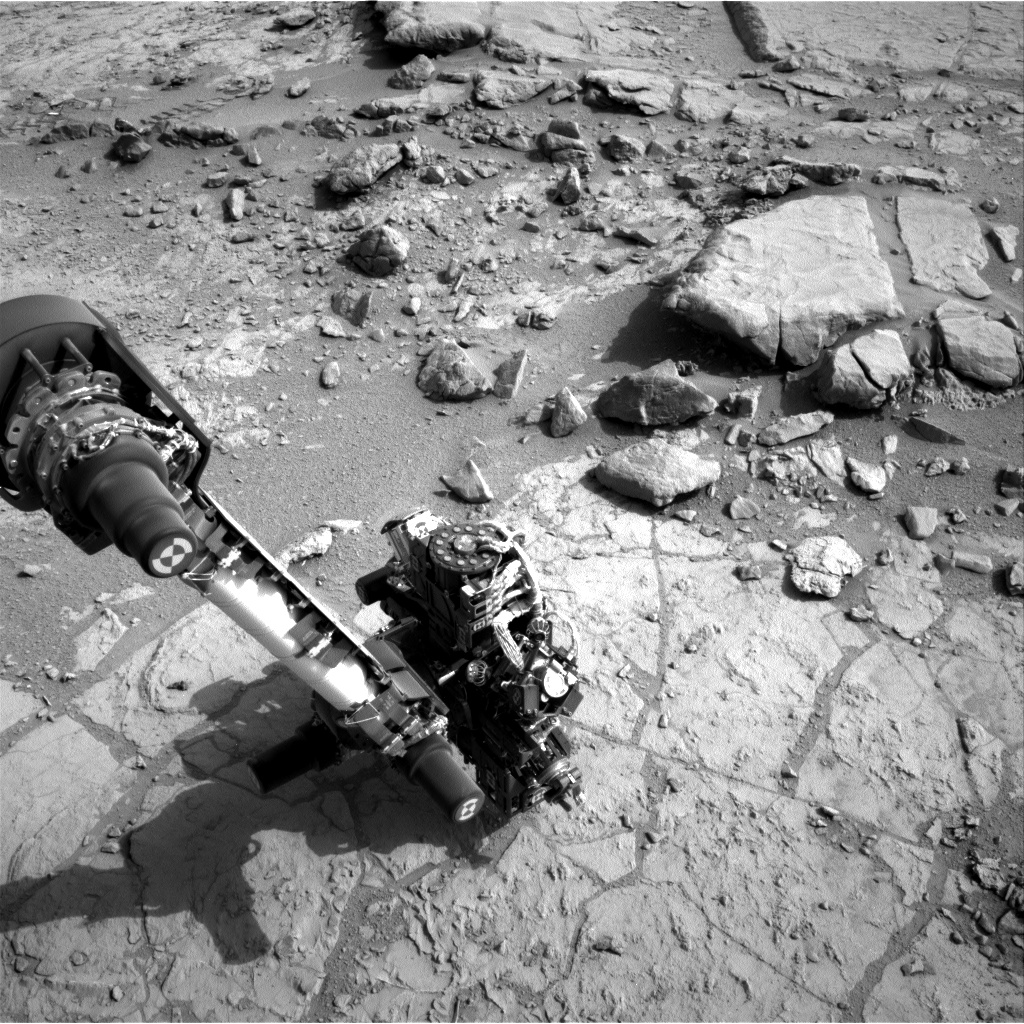
(Bild: NASA, JPL-Caltech)
In einem nächsten Schritt soll ein weiterer Pre-Load-Test durchgeführt werden, bei dem der Bohrer auch während der Marsnacht auf die Oberfläche gepresst wird. Hierbei soll ermittelt werden, welche Auswirkungen die erheblichen Temperaturschwankungen zwischen Tag und Nacht auf den unter Spannung stehenden Arm haben. Gegenwärtig fallen die Umgebungstemperaturen an Curiositys Standort von etwa 4 Grad Celsius während des frühen Nachmittags auf bis zu fast minus 70 Grad Celsius während der Marsnächte.
Bedingt durch diese extremen Temperaturschwankungen dehnen sich das Fahrgestell des Rovers und der Instrumentenarm leicht aus beziehungsweise ziehen sich wieder zusammen. Laut den Schätzungen der an der Mission beteiligten Techniker und Ingenieure belaufen sich diese Schwankungen auf etwa 2,4 Millimeter. Dieser nächtliche Pre-Load-Test sollte am gestrigen Tag beginnen und würde demzufolge immer noch andauern.
„Eigentlich beabsichtigen wir nicht, den Bohrer bei seinen Einsätzen auch über Nacht in dem angebohrten Gestein zu belassen. Aber für den Fall, dass dies doch einmal nötig sein sollte wollen wir wissen, welchen Belastungen das System dabei ausgesetzt sein wird“, so Daniel Limonadi vom Jet Propulsion Laboratory (JPL) der NASA, der leitende Systemingenieur für das Probenentnahmesystem des Rovers. „Bei diesem Test drücken wir den Arm allerdings nicht ganz so stark auf den Boden wie bei einer real erfolgenden Bohrung. So können wir etwas über die Auswirkungen der Temperaturschwankungen in Erfahrung bringen, ohne die Hardware dabei einer Gefahr auszusetzen.“
Die weiteren Vorbereitungen für die demnächst anstehende Bohrung werden voraussichtlich noch mindestens den Rest dieser Woche in Anspruch nehmen. In mehreren Schritten sollen dabei nach diesem ersten nächtlichen Pre-Load-Test noch weitere Tests durchgeführt werden. Parallel dazu ist die Gewinnung weiterer Daten über die geologische Beschaffenheit der für die Bohrung ausgesuchten Gesteinsformation durch zusätzliche Analysen vorgesehen.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
„Wir bereiten uns mit Bedacht sehr vorsichtig auf diese erste Bohrung vor, denn dieser Vorgang stellt eine große Herausforderung für uns dar“, so Daniel Limonadi. „Es wird das erste Mal sein, dass ein Roboter einen Stein anbohrt, um so eine Bodenprobe vom Mars zu entnehmen.“
Auch diese erste Bohrung wird dann in mehreren, bereits jetzt genau festgelegten Schritten erfolgen. So soll zunächst ein „drill-on-rock checkout“ erfolgen, bei dem ausschließlich der Schlagmechanismus des Bohrers zum Einsatz kommen wird, ohne den Bohrer dabei in eine Rotationsbewegung zu versetzen. Dabei soll getestet werden, ob die dabei erfolgenden Schlagbewegungen dazu führen, dass der Bohrer auch nach wiederholten Auf- und Abwärtsbewegungen die Oberfläche des Gesteins an dem gewünschten Punkt trifft.
In einem weiteren, als „mini-drill“ bezeichneten Schritt soll die Oberfläche anschließend lediglich bis zu einer Tiefe von etwa zwei Zentimetern angebohrt werden. Das dabei gewonnene, durch den Bohrvorgang pulverisierte Marsgestein wird dabei aufgrund der geringen Bohrtiefe nicht direkt in die Probeentnahmekammer des Bohrers gelangen, sondern sich vielmehr an der Marsoberfläche ablagern. Hierbei soll mittels anschließend anzufertigender Aufnahmen der MAHLI-Kamera überprüft werden, ob das zerkleinerte Material die erwarteten charakteristischen Eigenschaften zum Beispiel bezüglich der Größe der Gesteinskörner aufweist.
Erst die anschließend erfolgenden Bohrungen werden tief genug gehen, um das dabei gewonnene Material auch den beiden im Inneren des Rovers befindlichen Analyseinstrumenten CheMin und SAM zuzuführen.
Das Problem mit der Marszeit

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Derzeit wird der erste Einsatz des Bohrers allerdings durch die Zeitdifferenz erschwert, welche gegenwärtig zwischen dem in Pasadena/Kalifornien befindlichen Roverkontrollzentrum und dem Gale-Krater auf dem Mars herrscht, und die sich täglich um etwa 40 Minuten verschiebt. Curiosity übermittelt seine zuvor gesammelten Daten üblicherweise am späten Nachmittag örtlicher Marszeit zur Erde, wo sie dann bereits wenige Minuten später den an der Mission beteiligten Mitarbeitern zu Verfügung stehen. Erst nach der Auswertung dieser Daten können die an der Mission beteiligten Wissenschaftler und Ingenieure die nächsten Operationen des Rovers festlegen und entsprechende Kommandos zum Mars übermitteln.
Derzeit unterscheiden sich die lokalen Zeiten auf dem Mars und in Pasadena allerdings lediglich um rund 30 Minuten. Dies hat zur Folge, dass zum Beispiel die heute von Curiosity gesammelten Daten erst morgen analysiert werden können. Auf diesen Daten basierende Kommandos für die nächsten Aktivitäten können von dem Rover deshalb frühestens übermorgen ausgeführt werden. Die „mini-drill“-Aktivitäten können somit – und dies auch nur unter optimalen Umständen – frühestens zwei Tage nach den vorher durchzuführenden „drill-on-rock checkout“-Aktivitäten durchgeführt werden.
Bis zum heutigen Tag, dem „Sol“ 172 der Mission, hat der Marsrover Curiosity eine Distanz von etwa 746 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. In diesem Zeitraum haben die Kamerasysteme des Rovers mittlerweile über 41.000 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: