Nach der Übermittlung einer neuen Software-Version werden gegenwärtig die sechs Räder des Marsrovers Curiosity einer ausführlichen Analyse unterzogen. Die dort mittlerweile entstandenen Dellen und einzelne Risse werden allerdings nicht als bedrohlich eingestuft.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL.

(Bild: NASA, JPL-Caltech)
Bereits Anfang November 2013 wurde dem von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrover Curiosity eine neue Version seiner Betriebssoftware, die „Version 11“, übermittelt. Allerdings hatte sich dabei ein Fehler eingeschlichen, welcher am 7. November zu einem „Warm Reset“ des Computersystems des Rovers führte (Raumfahrer.net berichtete). Als Reaktion auf dieses Problem wurde in den folgenden Wochen wieder die zuvor eingesetzte und ohne Probleme arbeitende „Version 10“ genutzt.
Am 9. Dezember 2013 starteten die für den Betrieb des Rovers verantwortlichen Mitarbeiter des Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien einen neuen Anlauf für das Überspielen des neuen Software-Upgrades. Die damit verbundenen Arbeiten dauerten bis zum 14. Dezember an und verliefen erfolgreich. Durch dieses mittlerweile dritte Upgrade der Curiosity-Software seit der Landung des Rovers auf dem Mars sollen unter anderem die Fähigkeiten der autonomen Navigation erweitert werden.
Beabsichtigt ist dabei, die Abstände zwischen den einzelnen autonom durchzuführenden Etappen einer Fahrt noch weiter zu reduzieren und Fahrten im autonomen Navigationsmodus auch an aufeinanderfolgenden Tagen ohne das zwischenzeitliche Eingreifen des Kontrollzentrums am JPL fortzusetzen. Außerdem, so Jim Erickson, der Projektmanager der Curiosity-Mission vom JPL, wird die neue Version der Software dem Roboterarm neue Bewegungsabläufe ermöglichen, welche bei der zukünftigen Erforschung der Marsoberfläche speziell an Hanglagen von Bedeutung sein werden.
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Während der Überspielung des Upgrades und der damit verbundenen Test wurden die wissenschaftlichen Arbeiten des Rovers stark reduziert beziehungsweise zeitweilig komplett eingestellt. Die stark limitierte verbleibende „freie Zeit“ wurde lediglich dazu nutzen, um weitere Teilproben einer bereits im Mai 2013 in der Region „Cumberland“ entnommenen Bodenprobe zu analysieren. Teile dieser Probe wurden seit deren Entnahme in dem CHIMRA-Probenentnahmesystem mitgeführt. Die nicht für Analysen genutzten Überreste wurden schließlich am 18. Dezember auf der Marsoberfläche „entsorgt“. Curiosity ist somit bereit für die Fortsetzung seiner Mission.
Überprüfung der Räder
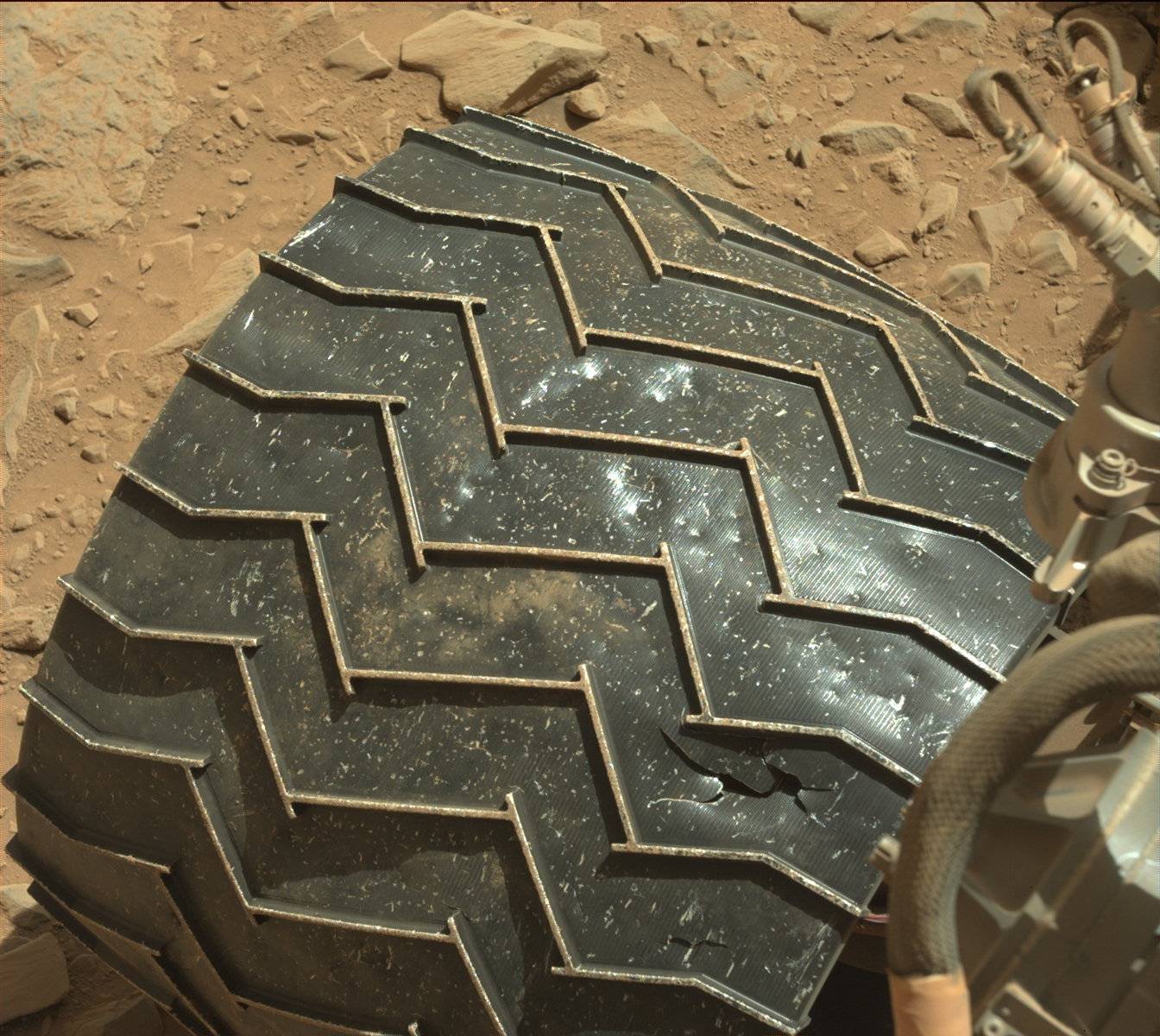
Vor der Wiederaufnahme seiner Fahrt zu dem im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons soll der Rover jedoch zunächst zu einer Stelle gesteuert werden, welche über eine realtiv ebene Oberfläche verfügt. Hier sollen die verschiedenen Kamerasysteme des Rovers in den kommenden Tagen mehrere umfassende Serien von Fotoaufnahmen erstellen, welche speziell die sechs Räder des Rovers zum Ziel haben werden und mit denen der Abnutzungsgrad der Räder untersucht werden soll.
Bereits nach wenigen Fahrten über die Marsoberfläche zeigten sich auf den Laufflächen der Räder einzelne Dellen. Während der letzten Wochen und Monate bildeten sich zudem verschiedene, teilweise mehrere Zentimeter lange Risse. Diese Abnutzungserscheinungen wurden aufgrund der Erfahrungen, welche bereits bei ausführlichen Tests im Vorfeld der Mission auf der Erde gesammelt werden konnten, erwartet und stellen laut dem JPL keine Beeinträchtigung für den weiteren Missionsverlauf dar.
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
„Wir wollen eine vollständige Bestandsaufnahme über den Zustand der Räder durchführen“, so Jim Erickson. „In den Rädern auftretende Dellen und Löcher wurden erwartet, aber der Verschleiß scheint sich in den letzten Monaten beschleunigt zu haben und steht vermutlich in einer Korrelation zu dem Passieren eines raueren Geländetyps.“
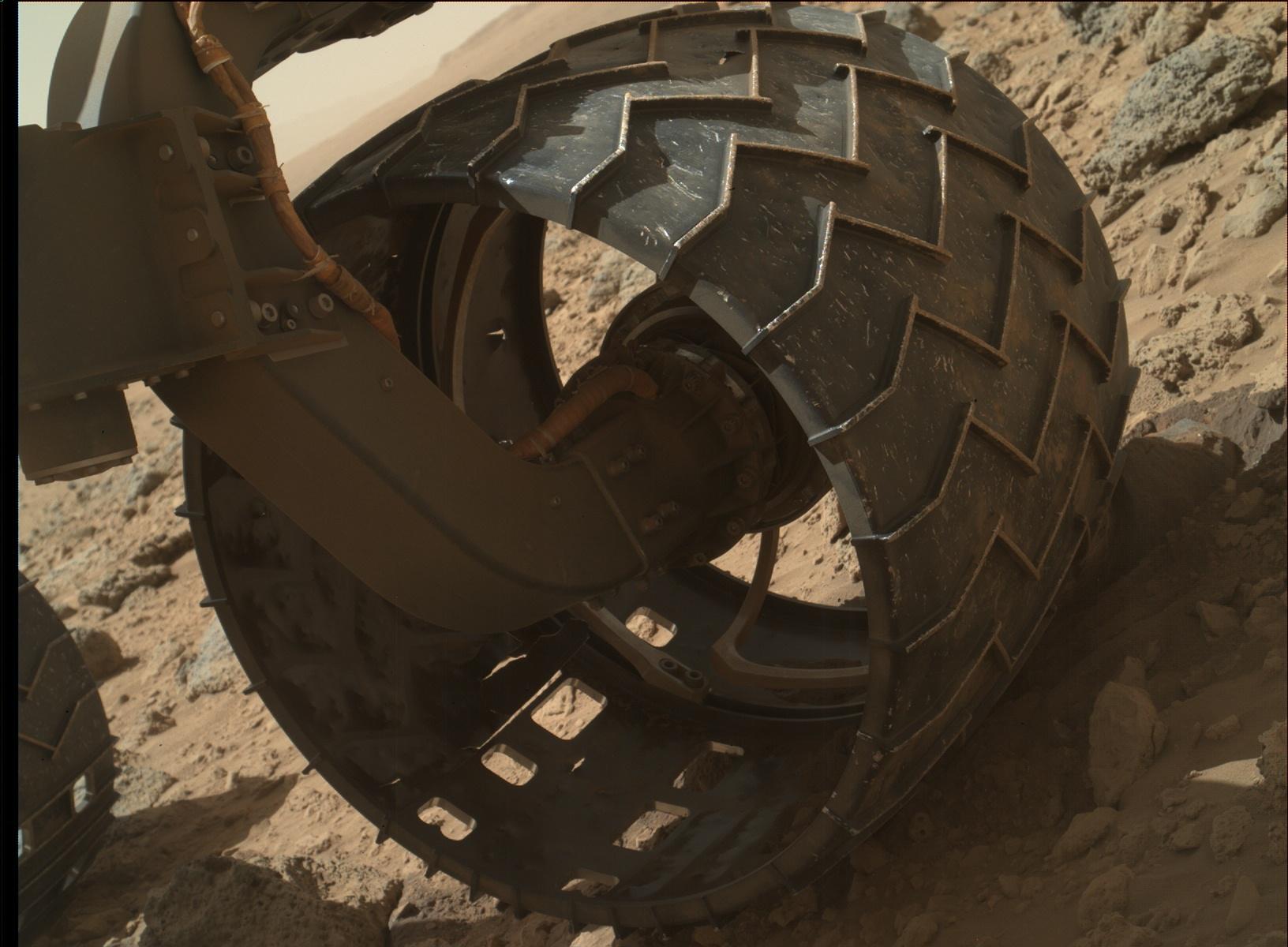
Seit dem Oktober 2013 bewegte sich der Rover durch eine Region, in der die Marsoberfläche von einer Vielzahl kleinerer und sehr spitzer Steine bedeckt war. Auf den zuvor passierten Oberflächenbereichen befanden sich dagegen deutlich weniger Steine.
Die aus einer Aluminiumlegierung bestehenden und mit Querleisten aus Titan verstärkten Räder des Rovers wurden so konstruiert, dass sie selbst bei erheblichen Beschädigungen der Laufflächen noch voll einsatzfähig sind und die Funktionstüchtigkeit von Curiosity durch derartige Verformungen nicht beeinträchtigt sein wird. Allerdings wollen die an der Mission beteiligten Techniker und Ingeniere die Ursachen für diese Abnutzung und deren Auswirkungen noch besser als bisher verstehen. Sollte dafür wirklich das passierte Gelände verantwortlich sein, so könnten solche Beschädigungen eventuell begrenzt werden, indem Curiosity bei zukünftigen Fahrten durch ein weniger raues Gelände manövriert oder derartigen Steinen nach Möglichkeit gezielt ausweicht.
Bis zum heutigen Tag, dem „Sol“ 490 seiner Mission, hat der Marsrover Curiosity eine Distanz von mehr als 4.600 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. Die bisher letzte Fahrt erfolgte am 20. Dezember 2013 und führte über eine Strecke von etwa 50 Zentimetern. Seit dem Erreichen unseres Nachbarplaneten haben die Kamerasysteme von Curiosity 106.818 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum: