Nach einer durch ein Computerproblem bedingten dreiwöchigen Zwangspause hat der Marsrover Curiosity in der vergangenen Woche sein wissenschaftliches Programm wieder aufgenommen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL. Vertont von Peter Rittinger.

(Bild: NASA, JPL-Caltech)
Bereits Ende Februar 2013 trat bei dem von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrover Curiosity ein Computerproblem auf, welches zur Folge hatte, dass sich der Rover in einen Sicherheitsmodus versetzte. Dadurch bedingt konnte der Rover in den folgenden Wochen keine weiteren wissenschaftlichen Untersuchungen mehr durchführen. Im Rahmen der Fehlerbehebung wurde Curiosity von den für die Kontrolle des Rovers zuständigen Mitarbeitern des Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien auf ein redundantes Computersystem umgeschaltet und zudem mit verschiedenen Updates seiner Betriebssoftware ausgestattet (Raumfahrer.net berichtete).
Diese Arbeiten konnten Ende der vergangenen Woche erfolgreich abgeschlossen werden und bereits seit dem 21. März sammelt Curiosity wieder wissenschaftliche Daten. Als erstes wurde dazu an diesem Tag die Wetterstation REMS reaktiviert. Am 23. März wurde dem Analyseinstrument SAM zudem zwecks weiterer Untersuchungen erneut Material aus einer Bodenprobe zugeführt, welches zuvor im Rahmen einer Bohrung aus der Marsoberfläche gewonnen wurde. Auch der Strahlungsdetektor RAD befindet sich mittlerweile wieder im Betriebsmodus und die wissenschaftliche Hauptkamera des Rovers, die MastCam, konnte in den vergangenen Tagen eine Vielzahl neuer Aufnahmen anfertigen und an das Kontrollzentrum übermitteln.
„Wir befinden uns somit wieder im vollen wissenschaftlichen Betriebsmodus“, so Jim Erickson, der stellvertretende Projektmanager der Curiosity-Mission vom JPL.
Umschaltung der Steuerungskameras
(Bild: NASA, JPL-Caltech, Animation: Raumfahrer.net)
Die Wiederinbetriebnahme des Rovers war mit einer komplizierten und zeitaufwändigen Prozedur verbunden. Bedingt durch das Umschalten von der zuvor verwendeten A-Side des Computersystems auf die jetzt als primäres System eingesetzte B-Side mussten auch verschiedene, fest mit diesem Computersystem verbundene redundante Subsysteme aktiviert und anschließend überprüft werden.
Bei einem dieser Systeme handelt es sich um die für die Steuerung des Rovers auf der Marsoberfläche benötigten Navigationskameras (kurz „NavCams“) und die vorderen und hinteren Gefahrenvermeidungskameras (kurz „Front HazCams“ und „Rear HazCams“). Jedes dieser Systeme besteht aus jeweils vier einzelnen Kameras, von denen immer zwei fest mit einem Computersystem verbunden und ausschließlich von diesem genutzt werden können.
Aus diesem Grund waren bis Ende Februar lediglich die sechs fest mit der A-Side verbundenen Steuerungskameras aktiv und die erstmalige Inbetriebnahme der „Reservekameras“ wurde von den Mitarbeitern des JPL mit einer gewissen Spannung erwartet. Die Anordnung dieser Kameras ermöglicht unter anderem die Anfertigung von 3D-Bildern, mit deren Hilfe die Umgebung des Rovers räumlich dargestellt werden kann. Solche Aufnahmen sind notwendig, damit die für die Planung einer Fahrt verantwortlichen Roverdriver eine sichere Route durch das zu passierende Gelände festlegen können oder damit der an der Frontseite des Rovers montierte Instrumentenarm mit der notwendigen Präzision gesteuert werden kann.
Sollten die mit der B-Side verbundenen Kameras nicht einwandfrei funktionieren, so würde dies zu erheblichen Komplikationen im Weiterbetrieb des Rovers führen. Es zeigte sich jedoch, dass alle sechs redundanten Kameras einwandfrei arbeiten.
„Seit dem April 2012 – damals befanden wir uns noch auf dem Weg zum Mars – haben wir die Steuerungskameras der B-Side jetzt erstmalig erneut eingesetzt“, so Justin Maki, der Leiter des für diese Kameras verantwortlichen Teams des JPL. „Jetzt haben wir diese Kameras auch erstmals auf dem Mars benutzt und alle arbeiten fehlerfrei.“
Sonnenkonjunktion
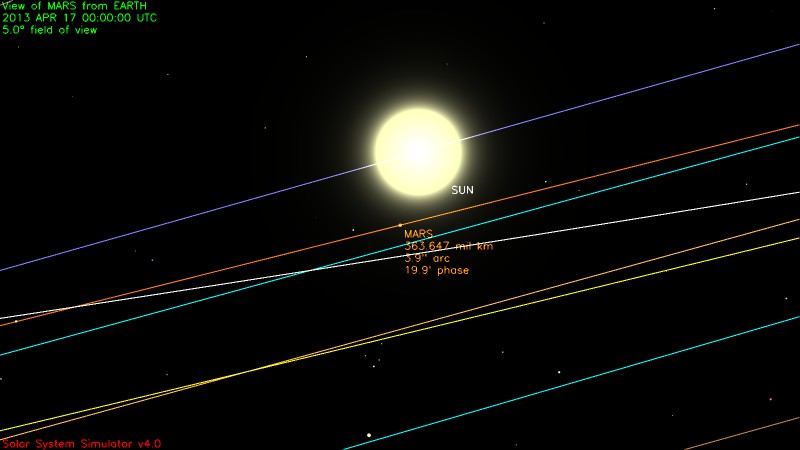
(Bild: JPL Solar System Simulator)
Neben der Fortsetzung der wissenschaftlichen Arbeiten konzentrieren sich die Mitarbeiter der Curiosity-Mission derzeit auch auf die demnächst anstehende Sonnenkonjunktion. Hierbei handelt es sich um eine spezielle, etwa alle 26 Monate auftretende Planetenkonstellation, bei der sich der Mars von der Erde aus gesehen in einem Abstand von weniger als fünf Grad von der Sonne befindet. Zum Zeitpunkt seines geringsten Abstandes wird sich der Mars dabei am 18. April lediglich 0,4 Grad – dies ist weniger als ein Vollmonddurchmesser – unterhalb der Sonne befinden.
Aus diesem Grund wird die Datenübertragung zwischen der Erde und dem Mars im April 2013 stark eingeschränkt beziehungsweise für die Dauer von mehren Tagen sogar nahezu unmöglich sein, da die von der Sonne ausgehende Strahlung die Funksignale, welche zwischen den beiden Planeten hin und her gesandt werden, zu sehr stört.
Im Zeitraum zwischen dem 4. April und dem 1. Mai wird deshalb keine Transmission von Kommandos von der Erde aus in Richtung Mars erfolgen, um den Empfang von eventuell unvollständigen und damit fehlerhaften Kommandosequenzen durch Curiosity zu vermeiden.
Deshalb werden die Missionsmitarbeiter dem Rover in den kommenden Tagen ein ausführliches „Arbeitsprogramm“ übermitteln, welches der Rover anschließend in den folgenden Wochen automatisch abarbeiten soll. Die in diesem Zeitraum von dem Rover gesammelten Daten sollen dann zunächst in dessen Bordcomputer abgelegt und erst nach dem Ende der Sonnenkonjunktion zur Erde übermittelt werden. Nach der Auswertung dieser Daten ist für Anfang Mai mindestens eine weitere Bohrung vorgesehen. Erst nach der Analyse der dabei gewonnenen Bodenproben wird der Rover seine Fahrt wahrscheinlich frühestens Mitte Mai 2013 fortsetzen und sich dabei zu der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons begeben.
Bis zum heutigen Tag, dem „Sol“ 226 seiner Mission, hat der Marsrover Curiosity eine Distanz von etwa 746 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. In diesem Zeitraum haben die Kamerasysteme des Rovers bisher 49.339 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum: