Curiosity gönnt sich grade eine Verschnaufpause bei der Fahrt zum nächsten wissenschaftlichen Ziel, Glenelg. Das gilt allerdings weniger für den umfangreich ausgestatteten Instrumentenarm des neuen Marsrovers. Ein ausführlicher Testlauf ist dort im Gange, bei dem auch wieder einige spektakuläre Aufnahmen entstanden sind.
Ein Beitrag von Klaus Donath, Ralph-Mirko Richter und Gertrud Felber. Quelle: JPL, Planetary Society. Vertont von Peter Rittinger.
(Bild: JPL)
Seit unserem letzten Statusupdate ist wieder einiges passiert auf dem Mars. So setzt der Rover Curiosity seine Reise zum 400 Meter entfernten Glenelg-Gebiet weiter fort, zu sehen auf dieser Karte. Die letzten beiden Fahrten gingen über eine Distanz von jeweils 30 Metern. Im Rahmen dieser Fahrten wurde auch die „VISODOM“-Software des Rovers getestet, mit deren Hilfe Curiosity kurze Strecken auf dem Mars selbstständig überbrücken kann. Speziell wurde dabei die Fähigkeit zum autonomen Fahren „Autonomous Visual Odometry“ überprüft. Durch die regelmäßig erfolgende Anfertigung von Bildern der Navigationskameras sowie der vorderen und hinteren Gefahrenerkennungskameras während einer Fahrt und eine anschließend autonom erfolgende Erzeugung von 3D-Bildern der Umgebung kann die Software des Rovers die Positionsveränderungen auf den Millimeter genau ermitteln. Dies ist zum Beispiel wichtig, um rechtzeitig reagieren zu können, falls der Rover sich in einer Sandfalle festfährt oder sich andere, durch das zu passierende Gelände ergebende Schwierigkeiten ergeben sollten.
{kind=link}
Sollte das Fahrverhalten bzw. das Resultat einer Fahrbewegung signifikant von den vorgesehenen Bewegungen abweichen, so würde der Rover die Fahrt automatisch abbrechen und auf weiterführende Befehle von der Erde warten. Am Sol 26 fand schließlich ein Test des CheMin-Spektrometers statt. SAM analysierte laut dem JPL zudem eine Probe der Marsatmosphäre.

(Bild: JPL)
Seit dem 5. September steht der Rover vorerst still, für mindestens acht Tage. In diesem Zeitraum soll die Checkout-Phase „CAP2“ durchgeführt werden. Im Rahmen der (immer noch andauernden) Funktionalitätstests für Curiosity sollen dabei speziell der Roboterarm, die daran befindlichen Instrumente APXS und MAHLI sowie das Probenentnahmesystem getestet werden. Es werden Bewegungsfixpunkte für die Bedingungen auf dem Mars angepasst aufgrund der geringeren Schwerkraft und anderen Atmosphäre auf dem Mars. Des Weiteren erforderte MAHLI einen Kalibrierungstest. Die hochauflösende Mikrospkopkamera am Instrumentenarm kann sogar „einzelne Körner in Talkum-Puder auflösen“, lt. der Aussage eines JPL-Verantwortlichen bei der Pressekonferenz am 6. September. Sie kann Ziele in einer Entfernung von etwa 2,1 cm bis unendlich gestochen scharf fokussieren. Allerdings ist sie sehr staubempfindlich, deshalb wurde die Staubschutzkappe erst vor kurzem und auch nur vorübergehend geöffnet. Beim APXS wird zunächst die mitgeführte Kalibrierungsprobe mit definierter Zusammensetzung gemessen, um das Instrument zu eichen. Erst danach steht es für Messungen auf der Marsoberfläche bereit.
(Bild: JPL)
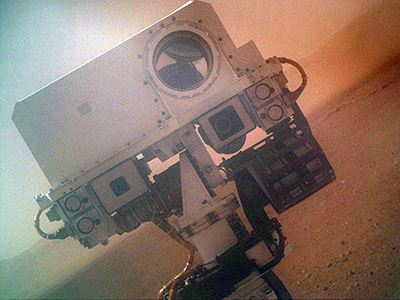
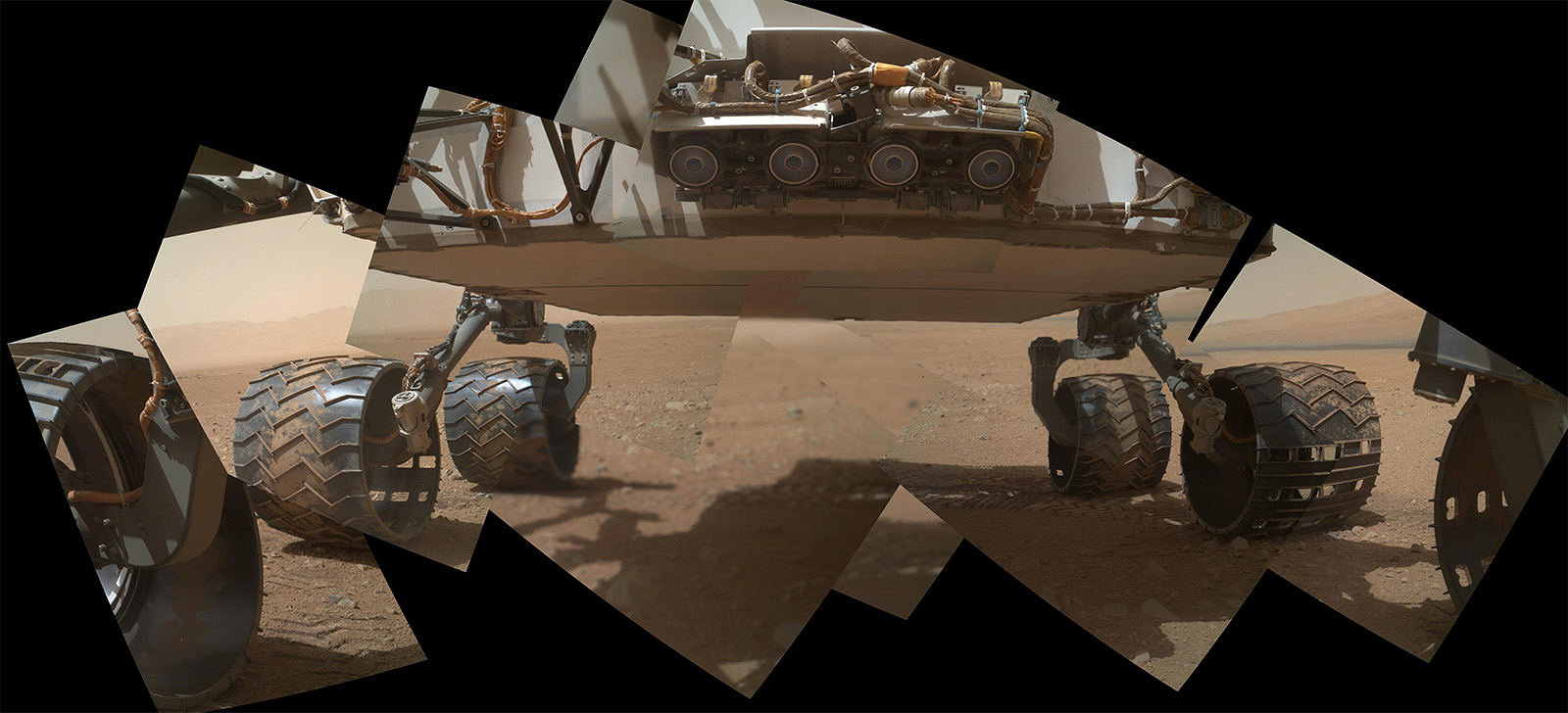
Im Zuge der Bewegung des Instrumenten-Arms entstanden einige schöne Aufnahmen, welche neue Details zum Zustand von Curiosity auf dem Mars enthüllten. Dazu gehört neben einem Selbstportrait vom Kamera-Arm auch ein erster Blick unter den Rover. Diese Ansicht des Unterbodens wurde mit der Mars-Hand-Lens-Imager-Kamera (MAHLI) an Sol 34, dem 9.09.2012, an der unteren Vorderseite von Curiosity aufgenommen. Anschließend wurde das Kalibrierungsziel fotografiert. Curiosity hat an Sol 34, also am 9. September 2012 zur Kalibrierung der MAHLI einen Penny mit dem Portät von Abraham Lincoln aus einem Abstand von 5 cm aufgenommen. Der Penny ist eine Anspielung auf eine Tradition von Geologen, eine Münze oder ein anderes Objekt zur Größenangabe bei Nahaufnahmen von Felsen zu platzieren. Zusätzlich befindet sich eine Reihe von Abbildungen zur Einstellung der Farbtemperatur und Bildschärfe auf dem Kalibrierungsziel.
{kind=link}
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: