Der Marsrover Curiosity hat durch mehrere in den letzten Tagen erfolgte Fahrten den Rand einer mit dem Namen Yellowknife Bay belegten Oberflächenformation auf dem Mars erreicht. Hier soll in den kommenden Tagen erstmals der Gesteinsbohrer des Rovers benutzt werden, um weitere Bodenproben von der Marsoberfläche zu entnehmen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, UMSF-Forum.
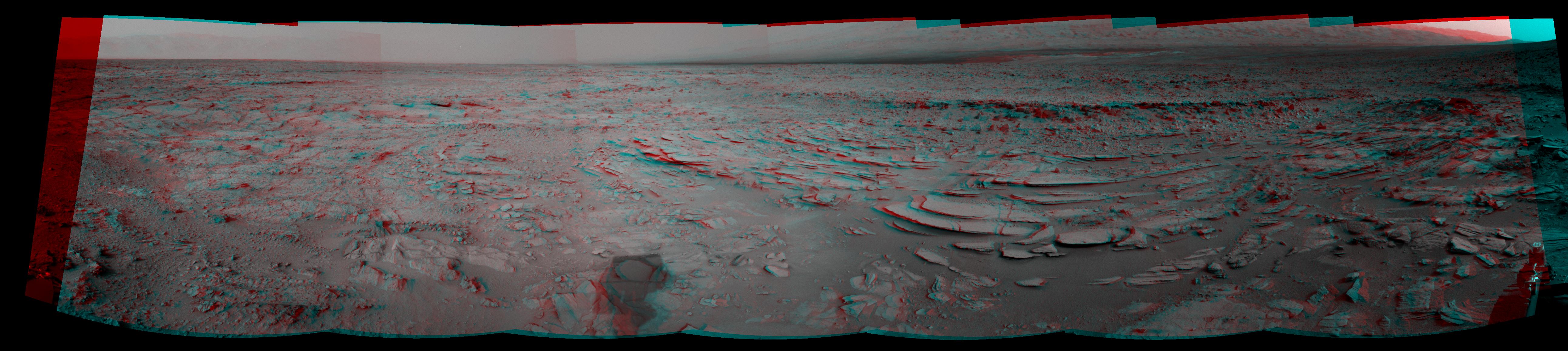
(Bild: NASA, JPL-Caltech)
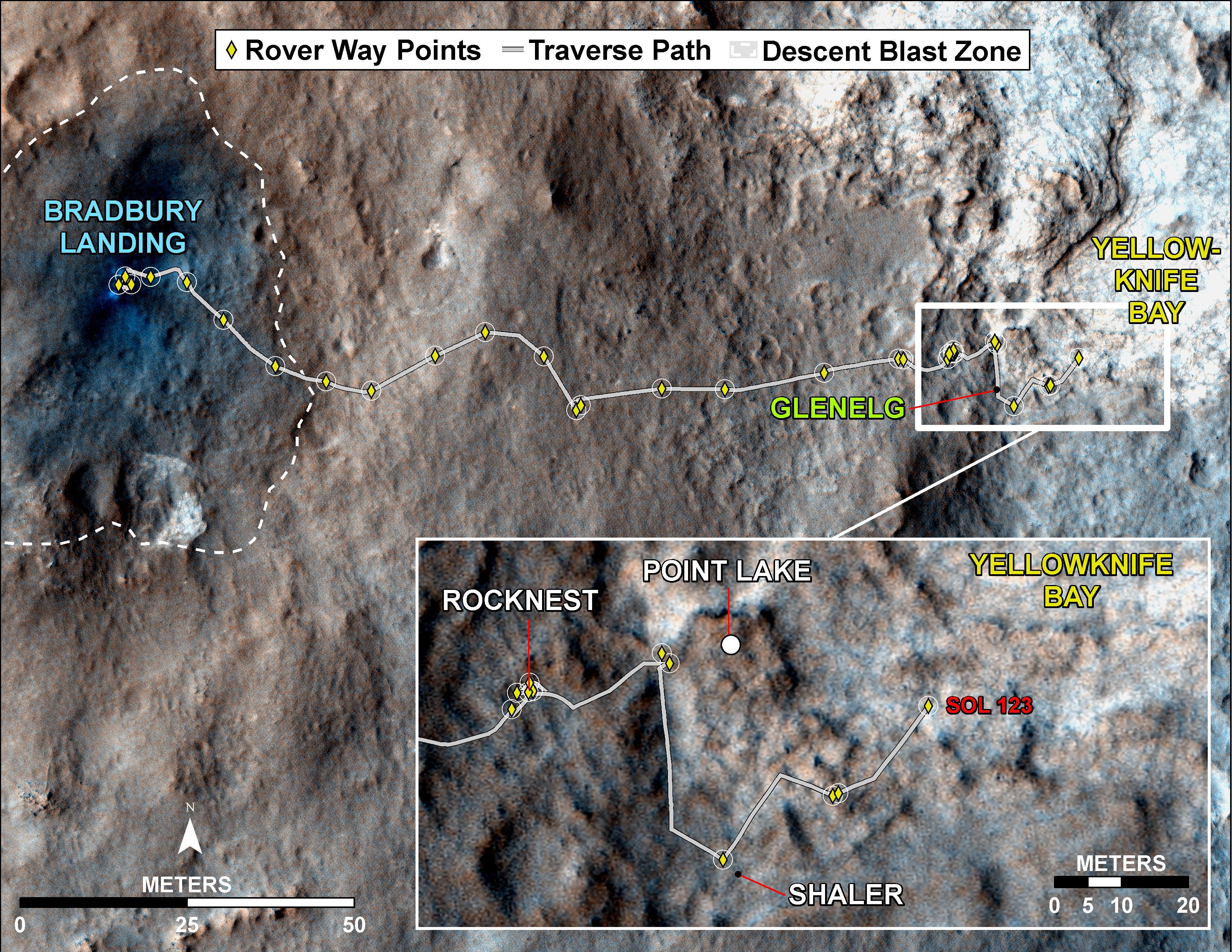
(Bild: NASA, JPL-Caltech, University of Arizona)
Nach der Beendigung der Untersuchungen an der Oberflächenformation „Rocknest“ und der Fortsetzung seiner Fahrt am 16. November 2012 (Raumfahrer.net berichtete), erreichte der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity am 6. Dezember, dem Sol 120 der Mission, eine weitere Stelle mit offen zutage liegenden, geschichteten Grundgestein.
Nach der Vollendung der an diesem Tag durchgeführten Fahrt wurde die MastCam – hierbei handelt es sich um eine der wissenschaftlichen Kameras des Rovers – dazu genutzt, um die einzelnen Gesteinsschichten dieser formell mit dem Namen „Shaler“ belegten Gesteinsformation im Detail abzubilden. Außerdem wurde eines der Analyseinstrumente eingesetzt, um die chemische Zusammensetzung der dort befindlichen Gesteine zu ermitteln. Zu diesem Zweck „feuerte“ die dafür verwendete ChemCam mehrere Laserpulse auf die Gesteinsformation ab. Das dabei verdampfte Oberflächenmaterial wurde anschließend durch ein in dieses Instrument integriertes Spektrometer analysiert.
Im Anschluss an diese Untersuchungen setzte Curiosity seine Fahrt bereits am darauffolgenden Tag fort, um sich weiter in Richtung auf die Oberflächenformation „Yellowknife Bay“ zu bewegen. Hierbei wurde zunächst ein in die nordöstliche Richtung zielender Kurs eingeschlagen, welcher im Verlauf der anschließenden Fahrten in die nördliche Richtung verlagert wurde. Eine der dabei erfolgenden Fahrten, die Fahrt vom 10. Dezember (Sol 123), führte dabei über eine Entfernung von rund 19 Metern. Allerdings fiel sie damit um etwa 30 Prozent geringer aus als ursprünglich geplant.
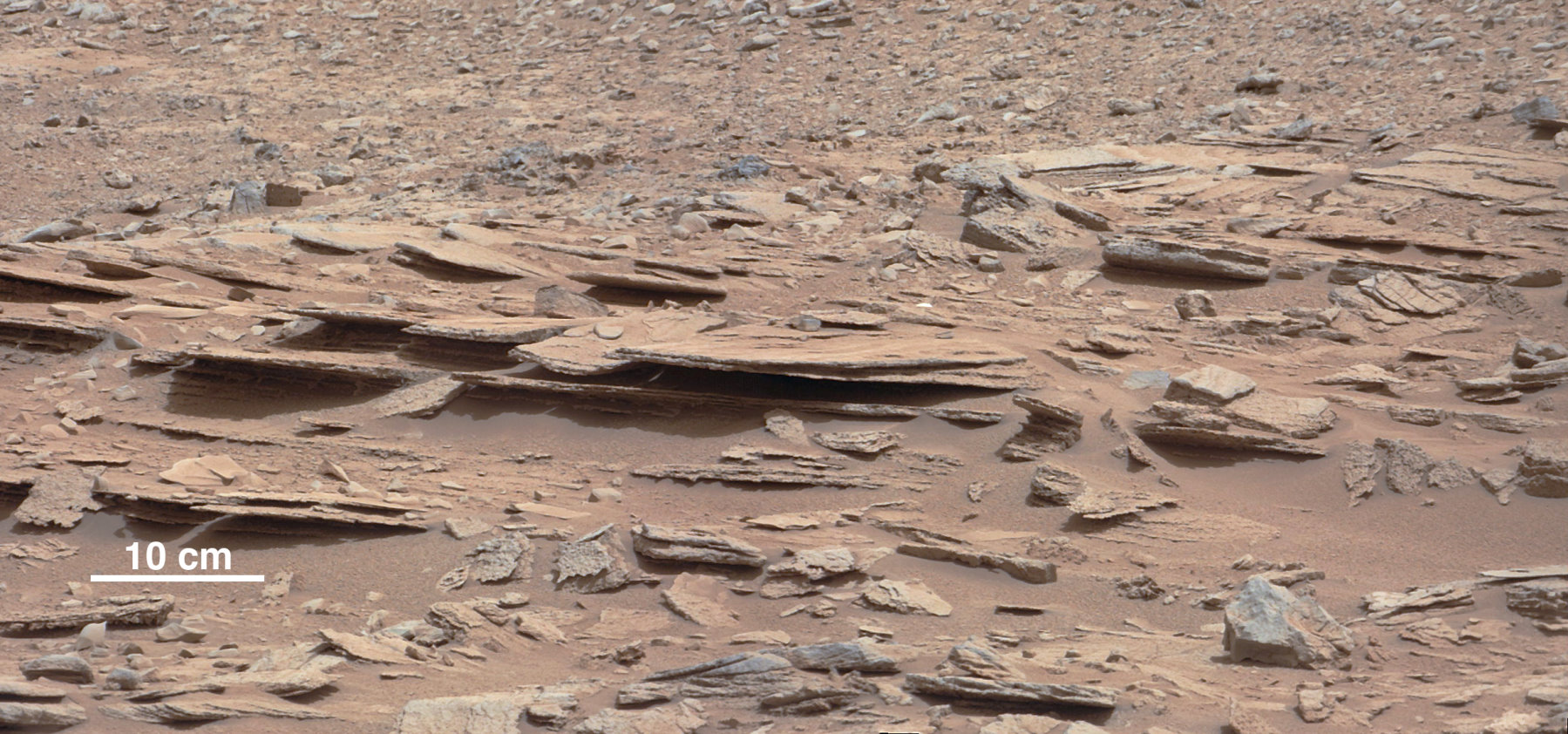
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Vor dem Beginn einer jeden Fahrt legen die für die Steuerung des Rovers verantwortlichen „Roverdriver“ bestimmte Sicherheitsparameter fest. Welche maximale Neigung darf der Rover während einer Fahrt zum Beispiel aufweisen? Wie hoch darf der Schlupf der Räder bei dieser Fahrt ausfallen? Sobald die Navigationssoftware des Rovers erkennt, dass diese Vorgaben überschritten sind, wird der Fahrbetrieb automatisch eingestellt. Der am 10. Dezember erfolgte Fahrtabbruch kam dadurch zustande, dass der Rover im Rahmen seiner Fahrt aufgrund der Unebenheit des passierten Geländes eine größere Neigung einnahm als ursprünglich vorausberechnet.
„Der Rover bewegt sich gegenwärtig über ein Gelände, welches anders gestaltet ist als die zuvor überquerten Regionen“, so Rick Welch, einer der Missionsmanager der Curiosity-Mission vom Jet Propulsion Laboratory der NASA in Pasadena/Kalifornien, von wo aus die Aktivitäten des Rovers gesteuert werden. „Dies hat zur Folge, dass der Rover dabei auch anders reagiert. Wir befinden uns immer noch in einer Lernphase und dies hat zur Folge, dass wir den Rover in diesem Terrain vorsichtiger und langsamer bewegen müssen als wir es uns eigentlich wünschen.“
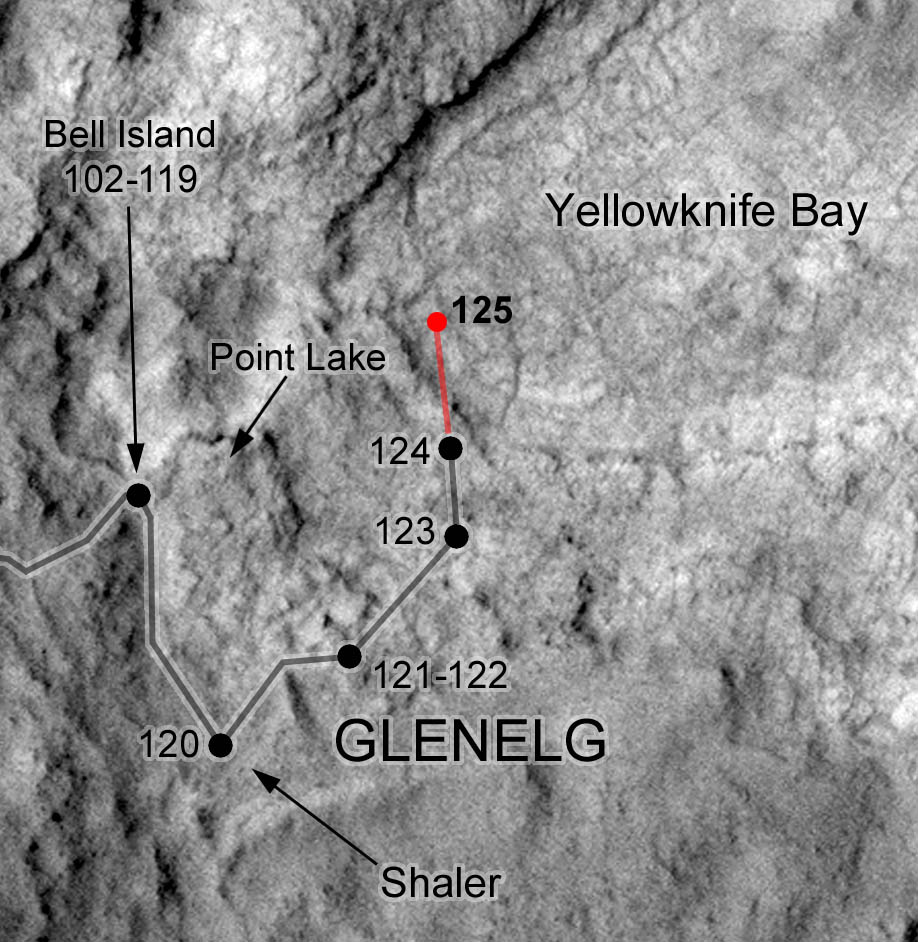
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Mit veränderten Sicherheitsparametern, welche der Unebenheit des Geländes Rechnung trugen, konnte Curiosity seine Fahrt jedoch bereits am darauffolgenden Tag fortsetzen. Am Ende des gestrigen Tages stand der Rover dabei unmittelbar vor der Oberflächenformation „Yellowknife Bay“. Im Verlauf einer am heutigen Tag,m dem Sol 125, erfolgten Fahrt konnte Curiosity erfolgreich den etwa 50 Zentimeter tiefen Abstieg zu Yellowknife Bay bewältigen.
In diesem Gebiet, so die aktuellen Planungen, soll noch vor den Weihnachtsfeiertagen erstmals der am Ende des Roboterarms des Rovers befestigte Gesteinsbohrer eingesetzt werden. Das „Powder Acquisition Drill System“ (kurz „PADS“) kann 1,6 Zentimeter durchmessende und bis zu fünf Zentimeter tiefe Löcher in die Marsoberfläche oder in die dort abgelagerten Gesteine bohren. Das im Rahmen eines solchen Bohrvorganges pulverisierte Marsgestein kann anschließend durch die verschiedenen Analyseinstrumente des Rovers eingehend untersucht werden.
Erst nach dem Abschluss dieses ersten PADS-Einsatzes und weiteren ausführlichen Untersuchungen der gegenwärtig erreichten Region wird sich Curiosity zu Beginn des Jahres 2013 in die südwestliche Richtung bewegen und sich dabei langsam der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges annähern. Im Rahmen der weiteren Mission soll der Rover an diesem Berg Stück für Stück emporsteigen und dabei die dort beobachteten geschichteten Gesteinsablagerungen ausführlich untersuchen.
Bis zum heutigen Tag, dem Sol 125 der Mission, hat der Marsrover Curiosity eine Distanz von 622 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. Dabei haben die Kamerasysteme des Rovers mittlerweile über 29.700 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) übermittelt. Diese Bilder sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.

(Bild: NASA, JPL-Caltech)
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: