Nach etwas mehr als fünf Monaten hat der Marsrover Curiosity die ausführliche Untersuchung der Region Pahrump Hills jetzt fast beendet. Noch an diesem Wochenende soll der Rover sein bisheriges Forschungsgebiet verlassen und die Fahrt zum Zentralberg im Inneren des Gale-Kraters fortsetzen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS, Unmanned Spaceflight.
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Bereits seit dem August 2012 erforscht der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity das Innere des 154 Kilometer durchmessenden Gale-Kraters. Neben den anderen wissenschaftlichen Zielen, welche die NASA mit dieser ambitionierten Mission verbindet, richtet sich das Interesse der Marsforscher dabei besonders auf die Untersuchung der klimatologischen und geologischen Bedingungen, welche einstmals in dieser Region des Mars vorgeherrscht haben. Ein speziellen Interesse gilt dabei dem im Inneren des Gale-Krater gelegenen Zentralberg „Aeolis Mons“.
Diverse Aufnahmen von verschiedenen Marsorbitern zeigten bereits im Vorfeld der Curiosity-Mission, dass dieser etwa 5.500 Meter über den Boden des Kraters hinausragende Berg an seinen Flanken über einen ausgeprägten Schichtaufbau verfügt. In den einzelnen Schichten ist – vergleichbar mit den Steilwänden des Grand Canyon im US-Bundesstaat Arizona – die langfristige klimatologische und geologische Geschichte dieser Region der Marsoberfläche enthalten. Anders als in den auf der Erde gewonnenen Bohrkernen liegen diese Informationen dabei mehr oder weniger offen zutage und sind für den Rover Curiosity somit relativ leicht einsehbar.
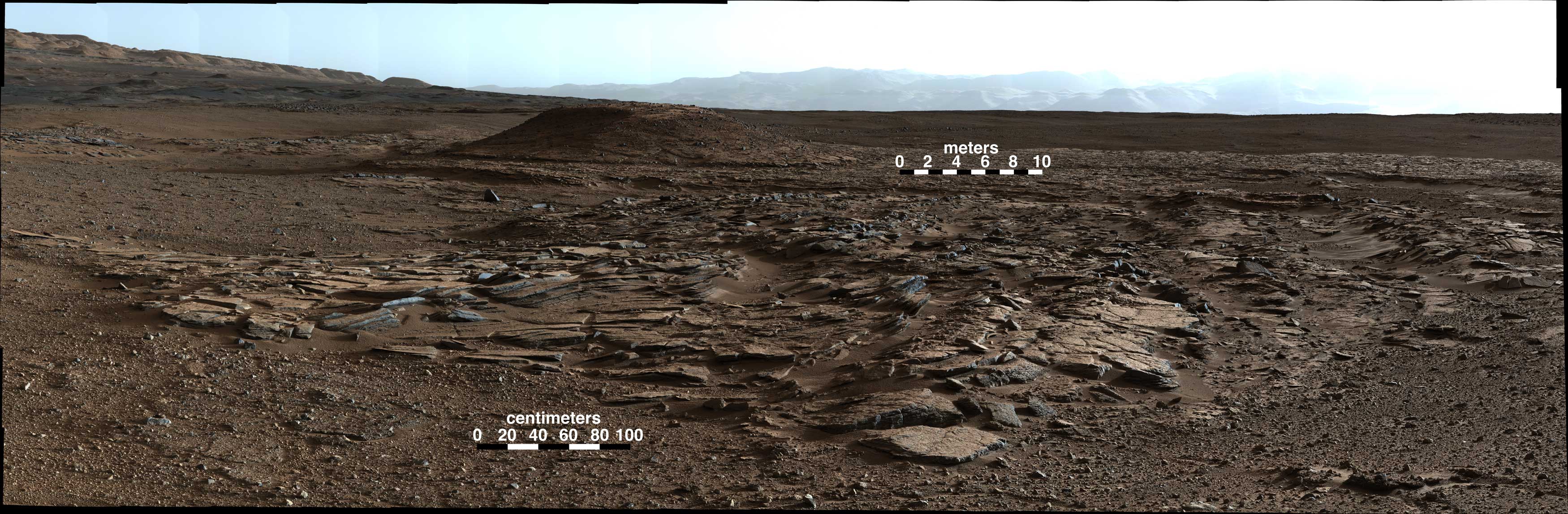
Auf seinem Weg zu der Basis dieses Berges erreichte Curiosity bereits am 18. September 2014, dem Sol 753 seiner Mission, die Region „Pahrump Hills“, welche sich etwa 150 Meter über den tiefsten Punkten des Gale-Kraters befindet. Dieses Gebiet ist nach der Meinung der an der Curiosity-Mission beteiligten Geologen ein Bestandteil der untersten Gesteinsschicht auf der sich der Zentralberg Aeolis Mons aufbaut. In den folgenden fünf Monaten haben sich die Marsforscher auf die Untersuchung der in der unmittelbaren Umgebung der Pahrump Hills befindlichen und dort frei zutage tretenden Grundgesteine konzentriert.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Dabei kam – neben den Instrumenten des Rovers – auch ein an dem Instrumentenarm befindlicher Bohrer zum Einsatz, mit dem an drei verschiedenen Stellen im Bereich der Pahrum Hills Materialproben entnommen und anschließend eingehend analysiert wurden.
Die letzte dieser Bohrungen erfolgte bereits am vergangenen Dienstag, dem 26. Februar 2015 und hatte eine mit dem Namen „Telegraph Peak“ belegte Gesteinsformation zum Ziel. Dabei wurde mit dem „Powder Acquisition Drill System“ (abgekürzt „PADS“) – so die korrekte Bezeichnung für das Bohrsystem des Rovers – ein 1,6 Zentimeter durchmessendes und etwa sechs Zentimeter tiefes Loch in die Gesteinsformation gebohrt. An den drei folgenden Tagen wurde das Bohrloch und ein Teil des bei der Bohrung zutage geförderten Materials ausführlich mit den verschiedenen Kamerasystemen des Rovers dokumentiert und mit mehreren Instrumenten analysiert.
Die bisherige Auswertung der während der letzten Monate in den Pahrump Hills gesammelten Daten hat gezeigt, dass diese Region – verglichen mit der chemischen Zusammensetzung der Gesteine und Böden, welche Curiosity vor dem Erreichen der Basis des Aeolis Mons untersuchte – im Verhältnis zu den vorhandenen Mengen an Aluminium und Magnesium einen erhöhten Anteil an Silizium aufweist. Dieser ‚Siliziumüberschuss‘ tritt dabei laut einer ersten Analyse der Daten des Alphapartikel-Röntgenspektrometers im Bereich von Telegraph Peak noch deutlicher zutage als bei den beiden anderen Bohrstellen in den Pahrump Hills, welche sich auf einem etwas niedrigeren Höhenniveau befanden.

(Bild: NASA, JPL-Caltech)
Gegenwärtig werden Teile des von dem Bohrloch entnommenen Materials mit einem weiteren Instrument, dem im Inneren des Rovers befindlichen CheMin-Spektrometer, analysiert. Hierbei wollen die beteiligten Wissenschaftler die mineralogische Zusammensetzung der Materialprobe entschlüsseln. Durch ähnliche Untersuchungen mit dem SAM-Instrument soll in den kommenden Tagen zudem auch die chemische Zusammensetzung des angebohrten Gesteins offengelegt werden.
Die Fahrt wird fortgesetzt
Mit dieser dritten Bohrung und den damit verbundenen Analysen ist die Untersuchung der Region „Pahrump Hills“ beendet. Bereits am morgigen Tag – dem Sol 912 der Mission – soll Curiosity dieses Gebiet verlassen. Dabei wird sich der Marsrover zunächst durch ein kleines mit dem Namen „Artist’s Drive“ belegtes Tal bewegen und anschließend seine Fahrt zu höher gelegenen Regionen des Aeolis Mons fortsetzen.
Durch eine langsame ‚Besteigung‘ des Berges, welche mit weiteren ausführlichen Analysen von aus geologischer Sicht interessant erscheinenden Ablagerungen verbunden sein wird, soll dessen Entwicklungsgeschichte im weiteren Verlauf der Mission Schritt für Schritt erforscht und entschlüsselt werden. Auf diese Weise erhoffen sich die auf die Erforschung des Mars spezialisierten Wissenschaftler weitere Erkenntnisse darüber, wann, wie, warum und in welchen Zeiträumen sich das Klima und die Umweltbedingungen auf dem Mars einstmals so dramatisch verändert haben.
Verbesserte Software
Dabei wird Curiosity auch ein erneutes Upgrade seiner Betriebssoftware zugute kommen, welches bereits vor rund vier Wochen an den Rover übermittelt, installiert und erfolgreich getestet wurde. Durch dieses Upgrade wurden speziell Curiositys Möglichkeiten der ‚autonomen Navigation‘ erweitert.
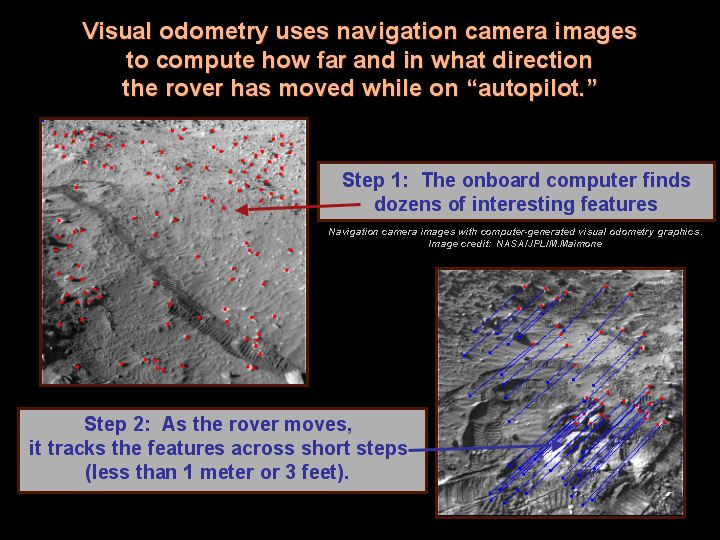
(Bild: NASA, JPL-Caltech, M. Maimone)
Aufgrund der großen Distanz zwischen Erde und Mars – abhängig von der Konstellation der beiden Planeten kann die Signallaufzeit bis zu 22 Minuten betragen – kann der Rover von den für die Steuerung von Curiosity verantwortlichen Roverdriver des Jet Propulsion Laboratory (JPL) nicht etwa mittels eines Joysticks ‚in Echtzeit‘ navigiert werden. Vielmehr müssen sämtliche von dem Rover zu absolvierenden Manöver im Voraus bis ins Detail geplant und festgelegt werden.
Zu diesem Zweck werten die Roverdriver die zuvor von Curiosity erstellten Fotoaufnahmen der Umgebung aus und erstellen aus diesen Daten eine zukünftig einzunehmende Route. Hierbei muss ein spezielles Augenmerk darauf gelegt werden, dass der Rover auf dieser Route nicht unbeabsichtigt in ein Gelände gerät, welches wegen eines unebenen Terrains oder aufgrund von dort befindlichen Sanddünen eine potentielle Gefahr darstellt. Nach der Übertragung der entsprechenden Kommandosequenzen führt der Rover diese Fahrtmanöver dann selbstständig durch.
Aufgrund diese Vorgehensweise ist die Länge der im Rahmen einer einzelnen Fahrt zurückzulegenden Strecke normalerweise auf eine Distanz von maximal etwa 100 Metern begrenzt. Dies entspricht der Entfernung, in der die Kamerasysteme des Rovers unter optimalen Bedingungen die Umgebung in einer für die Planung einer zukünftigen Fahrt ausreichend hohen Auflösung wiedergeben können. Bei einer durch Geländeunebenheiten oder schlechte Beleuchtungsverhältnisse bedingten schlechten Sicht auf die zukünftig zu passierenden Oberflächenbereiche fallen die Fahrten dagegen entsprechend kürzer aus.
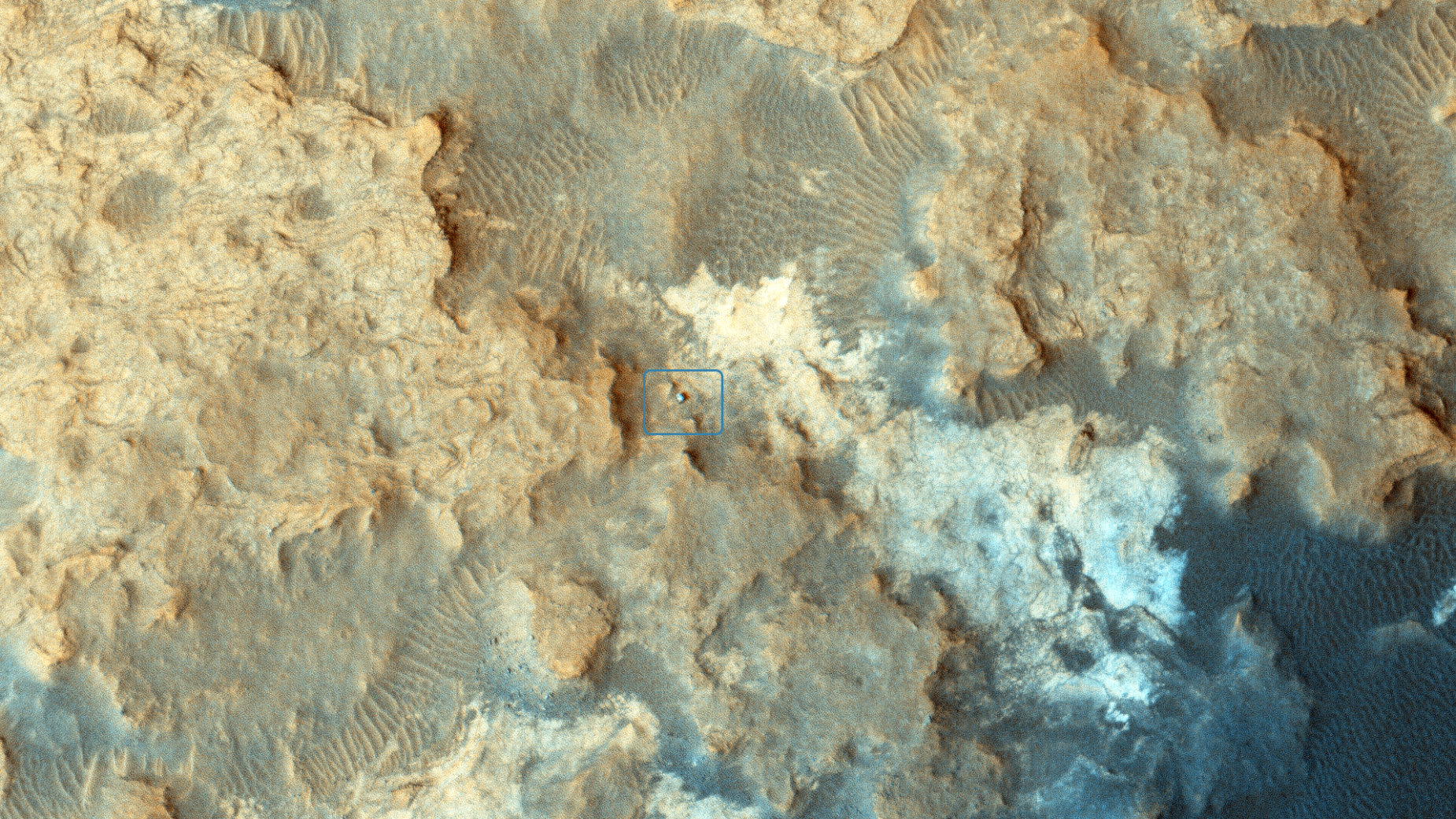
(Bild: NASA, JPL-Caltech, University of Arizona)
Allerdings ist der Rover in der Lage, dieses Manko auszugleichen, indem er sich nach dem von den Roverdrivern ‚vorgeplanten‘ Abschnitt einer Fahrt in einem sogenannten ‚autonomen Navigationsmodus‘ weiterbewegt. Hierbei unterbricht der Rover seine Fahrt in regelmäßigen Abständen von maximal wenigen Metern und fertigt mit seinen Gefahrenerkennungs- und Navigationskameras Fotoaufnahmen des vorausliegenden Geländes an.
Jeweils zwei Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab. Diese Aufnahmen werden von der ‚Drive-Software‘ des Rovers zu Stereoaufnahmen kombiniert – im Gegensatz zu konventionellen 2D-Aufnahmen ergibt sich bei stereoskopischen Aufnahmen auch ein räumlicher Eindruck der Landschaft – und anschließend autonom ausgewertet. Aus den so gewonnenen Informationen berechnet die Software von Curiosity anschließend einen sicheren Weg zu dem vorgegebenen Endpunkt seiner jeweiligen Tagesetappe.
Bis zum heutigen Tag, dem Sol 911 seiner Mission, hat der Marsrover Curiosity bereits mehr als zehn Kilometer auf der Marsoberfläche zurückgelegt. Dabei hat der Rover mit seinen Kamerasystemen inzwischen 219.245 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Verwandte Meldungen bei Raumfahrer.net:
- Mars: Geringe Mengen Methan und organisches Material (17. Dezember 2014)
- Curiosity: Wasser formte den Gale-Krater auf dem Mars (13. Dezember 2014)
- Marsrover Curiosity: Intensive Gesteinsanalysen (22. November 2014)
- Marsrover Curiosity bohrt bei den Pahrump Hills (27. September 2014)
- Curiosity am Fuß von Mount Sharp (15. September 2014)
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: