Der Marsrover Curiosity befindet sich gegenwärtig noch etwa 7,1 Kilometer von der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons entfernt. Auf seinem Weg zu diesem nächsten Ziel hat der Rover am vergangenen Dienstag erstmals einen Teilabschnitt im sogenannten autonomen Navigationsmodus überbrückt.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL.

(Bild: NASA, JPL-Caltech)
Die ersten Monate des Jahres 2013 verbrachte der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity mit der Untersuchung einer mit dem Namen „Glenelg“ belegten Region im Inneren des Gale-Kraters. Seit mittlerweile etwa zwei Monaten befindet sich Curiosity auf dem Weg zu einer Stelle an der Basis des Zentralbergs des Gale-Kraters, von wo aus der Rover verschiedene geschichtete Gesteinsablagerungen in den unteren Hangregionen dieses mit dem Namen Aeolis Mons belegten Berges erreichen kann. Seit dem Verlassen der Region Glenelg legte Curiosity etwa 1.500 Meter zurück.
Aufgrund der großen Distanz zwischen Erde und Mars – abhängig von der Konstellation der beiden Planeten kann die Signallaufzeit bis zu 22 Minuten betragen – kann Curiosity von den für die Steuerung des Rovers verantwortlichen Roverdrivern des Jet Propulsion Laboratory (JPL) allerdings nicht etwa mittels eines Joysticks in Echtzeit navigiert werden. Vielmehr müssen sämtliche von dem Rover zu absolvierenden Manöver im Voraus bis ins Detail geplant und festgelegt werden. Nach der Übertragung der entsprechenden Kommandosequenzen führt der Rover diese Manöver dann selbstständig durch, ohne dass die Mitarbeiter des JPL dabei über die Möglichkeit eines direkten Eingreifens verfügen.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Aufgrund diese Vorgehensweise ist die Länge der im Rahmen einer einzelnen Fahrt zurückzulegenden Strecke normalerweise auf eine Distanz von etwa 100 Metern begrenzt. Dies entspricht der Entfernung, in der die Kamerasysteme des Rovers die Umgebung in einer für die Planung einer zukünftigen Fahrt ausreichend hohen Auflösung wiedergeben können. Bei einer schlechten Sicht auf die zukünftig zu passierenden Oberflächenbereiche fallen die Fahrten dagegen normalerweise entsprechend kürzer aus.
Autonome Navigation
Allerdings ist der Rover in der Lage, dieses Manko auszugleichen, indem er sich im sogenannten „autonomen Navigationsmodus“ fortbewegt. Zu diesem Zweck unterbricht der Rover seine Fahrt in regelmäßigen Abständen von maximal wenigen Metern und fertigt mit seinen Gefahrenerkennungs- und Navigationskameras Fotoaufnahmen des vorausliegenden Geländes an. Jeweils zwei Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab. Diese Aufnahmen werden von der „Drive-Software“ des Rovers zu Stereoaufnahmen kombiniert – im Gegensatz zu konventionellen 2D-Aufnahmen ergibt sich bei stereoskopischen Aufnahmen auch ein räumlicher Eindruck der Landschaft – und anschließend autonom ausgewertet. Aus den so gewonnenen Informationen berechnet die Software von Curiosity anschließend einen sicheren Weg zu dem vorgegebenen Ziel.
„Curiosity fertigt mehrere Sätze von Stereo-Aufnahmen an, aus denen der Bordcomputer eine Karte mit allen erkennbaren potentiell gefährlichen Hindernissen oder unwegsamen Geländeabschnitten erstellt“, so Mark Maimone vom Roverdriver-Team des JPL. „Die Software bewertet dann alle denkbaren Wege zum vorgegebenen Zielpunkt und wählt die Route aus, die am besten geeignet erscheint.“ Durch diese Vorgehensweise sind zum Beispiel auch Fahrten zu Punkten durchführbar, bei denen die zu befahrene Route vor dem Beginn der jeweiligen Fahrt nicht komplett einsehbar und damit vom Roverkontrollzentrum aus nicht planbar ist.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
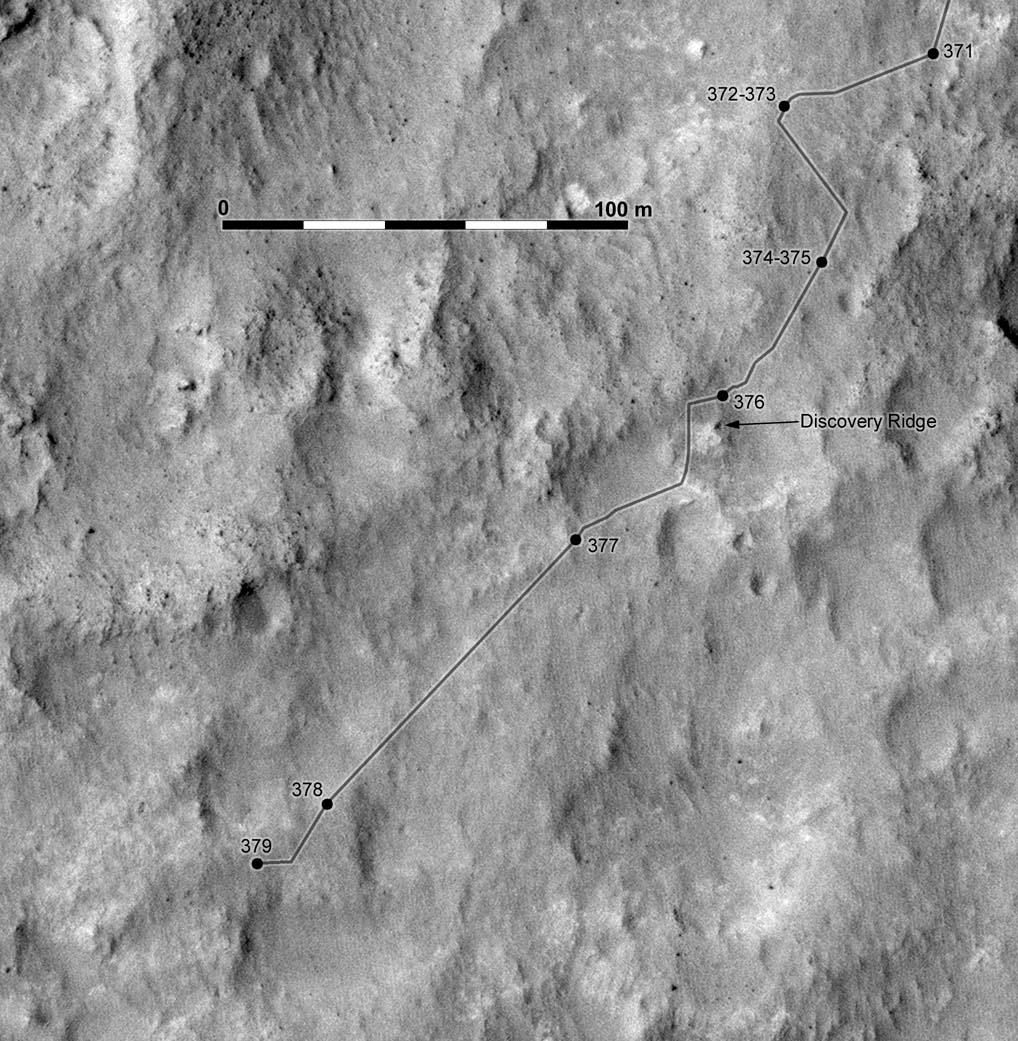
Bereits in der vergangenen Woche erfolgte eine Art Generalprobe für diesen autonomen Navigationsmodus. Curiosity suchte sich seine Strecke dabei zwar selbstständig aus, musste sich bei der praktischen Umsetzung allerdings an die vorher festgelegten Routen-Vorgaben der Roverdriver halten. Die erste „echte“ Bewährungsprobe erfolgte dann am vergangenen Dienstag, dem „Sol“ 376 der Curiosity-Mission.
Diese Fahrt führte den Rover durch eine kleine Senke, welche vom Endpunkt der vorherigen Fahrt aus nicht einsehbar war. Für diesen Teilbereich der Strecke konnten die Roverdriver somit keine Kommandos vorgeben. Dieser erste Praxistest verlief erfolgreich. Insgesamt wurden am Sol 376 etwa zehn Meter der über eine Gesamtstrecke von rund 40 Meter führenden Fahrt im autonomen Navigationsmodus durchgeführt.
„Wir konnten den Bereich vor der Geländevertiefung einsehen und haben dem Rover mitgeteilt, wo er fahren soll. Wir konnten auch den Bereich auf der anderen Seite der Senke einsehen, wo sich der Zielpunkt der geplanten Fahrt befand. In dem dazwischen liegenden Teilbereich der Strecke war Curiosity allerdings auf sich alleine gestellt und hat die zu befahrende Route selbstständig gewählt“, so John Wright, ein weiterer Roverdriver des JPL.
Bei der Software, welche Curiosity derzeit für seine selbstständigen Fahrten auf der Marsoberfläche nutzt, handelt es sich um eine verbesserte Version eines vergleichbaren Programms, das aktuell auch immer noch bei dem bereits seit dem Januar 2004 auf unserem Nachbarplaneten operierenden Marsrover Opportunity zum Einsatz kommt.
Der zukünftige Weg zum Aeolis Mons
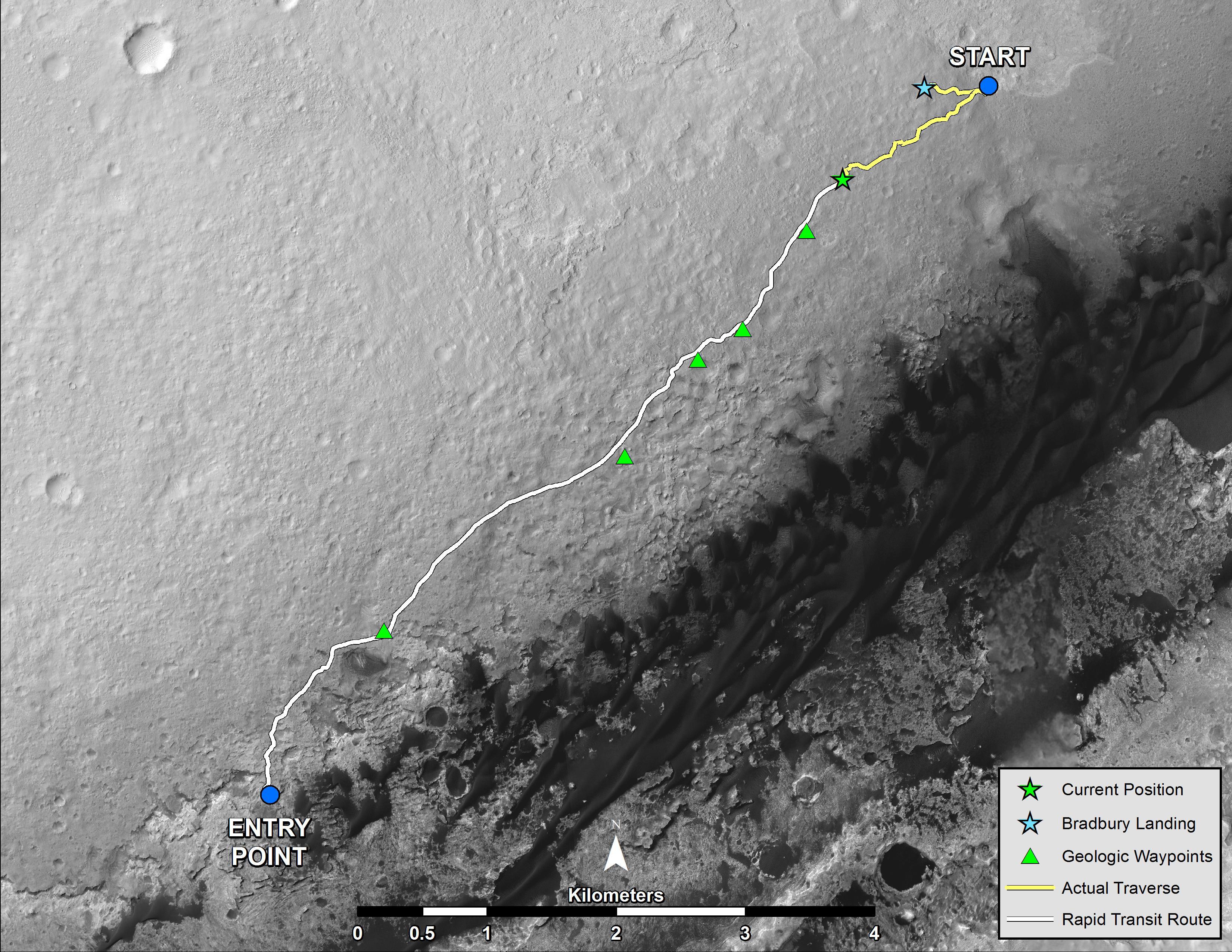
(Bild: NASA, JPL-Caltech, University of Arizona)
Durch den zukünftigen Einsatz der autonomen Navigation des Rovers könnten sich die Wegstrecken, welche im Rahmen einer einzelnen Fahrt zurückgelegt werden können, theoretisch erhöhen. Bis zum Erreichen seines eigentlichen Ziels, einem Punkt an der Basis des Zentralberges Aeolis Mons, muss Curiosity derzeit noch eine Strecke von weiteren rund 7.100 Metern zurücklegen. Diese Strecke soll schnellstmöglich und ohne größere Unterbrechungen überbrückt werden. Dabei muss allerdings bedacht werden, dass es sich bei der Curiosity-Mission um eine Forschungsmission handelt, welche möglichst viele Daten über den Mars sammeln soll.
Am Rande der vorgesehenen Route befinden sich mehrere Bereiche, welche nach Ansicht der an der Mission beteiligten Wissenschaftler lohnende Untersuchungsobjekte darstellen könnten. An einigen dieser Punkte wird der Rover deshalb voraussichtlich mehrtägige Zwischenstopps einlegen. Der erste dieser Punkte ist derzeit noch rund 400 Meter von der aktuellen Position des Rovers entfernt. Aufnahmen der HiRISE-Kamera, welche sich an Bord des Marsorbiters Mars Reconnaissance Orbiter (MRO) befindet, deuten darauf hin, dass Curiosity dort verschiedene Ansammlungen von offen zutage liegenden Gesteinsformationen untersuchen kann.
„Jeder dieser Wegpunkte eröffnet Curiosity die Möglichkeit für einen Zwischenstopp auf seinem Weg zum Mount Sharp [so die NASA-interne, allerdings inoffizielle Bezeichnung des Zentralberges Aeolis Mons] und für die Untersuchung interessanter Oberflächenstrukturen in der Umgebung“, so John Grotzinger vom California Institute of Technology (Caltech), der Projektwissenschaftler der Curiosity-Mission. „Diese Punkte befinden sich sehr nahe am schnellsten Weg zur Basis des Mount Sharp. Wir werden an jedem Punkt über einige Tage hinweg Untersuchungen durchführen und – falls es uns interessant genug erscheint – an diesen Punkten eventuell auch eine Bohrung durchführen.“
Phobos-Transit
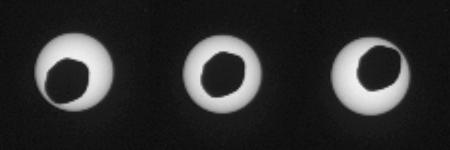
(Bild: NASA, JPL-Caltech, Malin Space Science Systems, Texas A&M University)
Inzwischen stand jedoch wieder einmal Phobos, der größere und innere der beiden Marsmonde auf dem wissenschaftlichen Beobachtungsprogramm des Rovers.
Am 20. August 2013, dem Sol 369 der Mission, konnte die MastCam-100 zum wiederholten Mal einen Transit dieses Marsmondes vor der Sonnenscheibe dokumentieren. Der Rover unterbrach zwecks der Anfertigung entsprechender Bilder seine Fahrt an diesem Tag, um über einen Zeitraum von 31 Sekunden hinweg die Sonne abzubilden. Zuvor angestellte Berechnungen hatten ergeben, dass in diesem Zeitraum der Mond Phobos vor der Sonnenscheibe entlang ziehen wird.
„Der Transit ereignete sich während der Mittagszeit an Curiositys Aufenthaltsort, wodurch Phobos dem Rover besonders nahe war“, so Mark Lemmon von der A&M University in Texas/USA, einer der an dem MastCam-Instrument beteiligten Wissenschaftler. „Dadurch erschien der Mond größer als zu anderen Tageszeiten. Auf dem Mars gibt es nichts, was einer totalen Sonnenfinsternis näher kommt, als dieses Ereignis.“
Selbst unter den günstigsten Umständen bedeckt der rund 27 x 22 x 19 Kilometer durchmessende Mond, welcher den Mars in einer Entfernung von etwa 6.000 Kilometern umläuft, gerade einmal knapp die Hälfte der Sonnenscheibe. Statt einer „totalen Sonnenfinsternis“ sind auf dem Mars somit lediglich ringförmige Finsternisse zu beobachten, welche von den Experten in diesem Fall allerdings als Transits bezeichnet werden.
Die Dokumentationen solcher Ereignisse durch die Rover Curiosity und Opportunity liefern den Wissenschaftlern wichtige Daten, mit denen sich die Bahnparameter der beiden Marsmonde noch genauer als bisher bestimmen lassen (Raumfahrer.net berichtete). Aus den zeitlich exakt dokumentierten Abläufen der Finsternisse (Beginn des Transits, Bahnverlauf der Monde vor der Sonnenscheibe, Ende des Transits) lassen sich die Bahnen von Phobos und Deimos – dem zweiten Marsmond – mit sehr hoher Präzision bestimmen.
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Die im Rahmen dieses Transits angefertigten Fotos sind die schärfsten bisher angefertigten Aufnahmen einer Sonnenfinsternis auf dem Mars. Erste Auswertungen der aufgenommenen Bilder zeigen, dass sich Phobos etwa zwei bis drei Kilometer näher am Zentrum der Sonnenscheibe befand als vorausberechnet. Die Bahn von Phobos konnte demnach bisher also noch nicht mit ausreichender Genauigkeit bestimmt werden, was weitere diesbezügliche Forschungen notwendig macht.
Bis zum heutigen Tag, dem Sol 379 seiner Mission, hat der Marsrover Curiosity eine Distanz von rund 2.500 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. Die bisher letzte Fahrt erfolgte erst vor wenigen Stunden am heutigen Tag und führte über eine Distanz von etwa 22 Metern in die südwestliche Richtung.
Seit dem Erreichen des Mars haben die Kamerasysteme von Curiosity 78.744 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum: