In der letzten Woche fand ein erfolgreiches Experiment an der Außenseite der Internationalen Raumstation statt, bei dem das Betanken eines Satelliten simuliert wurde.
Ein Beitrag von Günther Glatzel. Quelle: NASA, CSA.

(Bild: NASA-TV)
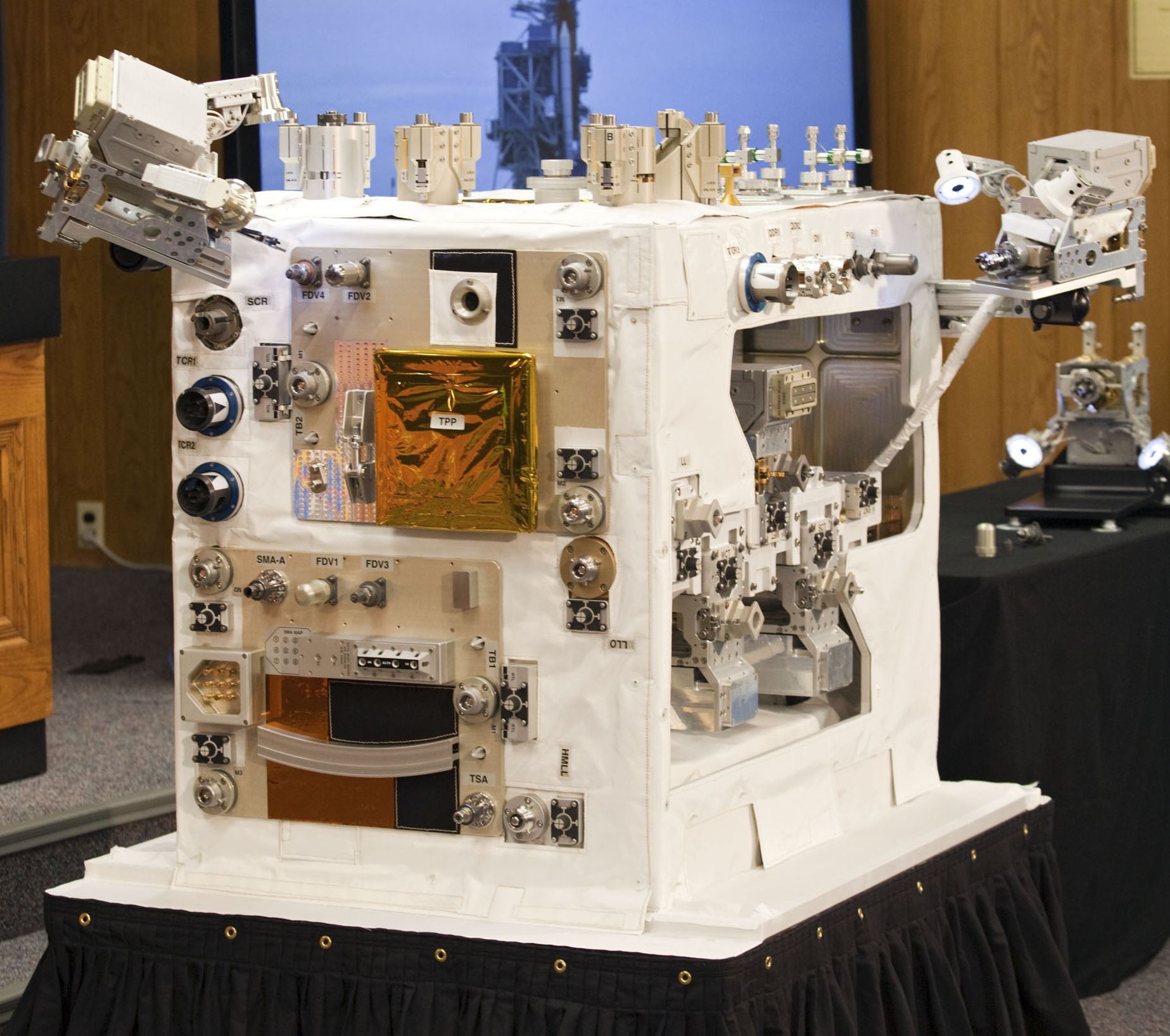
Das entsprechende Equipment war beim letzten Shuttle-Flug STS 135 im Sommer 2011 zur ISS gebracht worden. Es besteht im Wesentlichen aus einer quaderförmigen Apparatur mit Einfüllstutzen, die mit Muttern, Kappen und Sicherungsdrähten versehen sind. Außerdem sind auch die erforderlichen Spezialwerkzeuge Bestandteile der Robotic Refueling Mission (RRM).
Für die Operationen wurde die am Ende des Stationsmanipulators angebrachte Erweiterung DEXTRE (Special Purpose Dexterous Manipulator) verwendet, was etwa Spezialmanipulator für Geschicklichkeit erfordernde Aufgaben bedeutet. Er verfügt über zwei Arme, an denen unterschiedliche Werkzeuge angebracht werden können. Diese trägt er normalerweise in einer dafür vorgesehenen Vorrichtung bei sich. Die für die Betankungssimulation erforderlichen Tools wurden allerdings nur für diese Aufgabe konstruiert und zur Station gebracht.
Am 14. Januar begann das Experiment, musste allerdings aufgrund eines Software-Problem gleich wieder abgebrochen werden. Nachdem dieses behoben war, nahm Dextre die Aufgabe ein paar Tage später erneut in Angriff. Alle Kommandos kamen dabei von der Erde, die ISS-Besatzung war also in das Experiment nicht direkt involviert. Dies entspricht auch dem Ziel der Mission. Mit einem derartigen unbemannten System sollen in Zukunft Satelliten in beliebigen Erdumlaufbahnen betankt werden können.
Am ersten Tag (14. Januar) entnahm Dextre der RRM ein Werkzeug, mit dem sich Sicherungsdrähte durchschneiden lassen. Damit wurde dann genau das gemacht, wofür das Werkzeug geschaffen wurde: ein Sicherungskabel wurde durchtrennt. Mit dem anderen Arm wurde zudem eine äußere Abdeckung, die als dritte Sicherung dient, abgezogen. Dazu „ergriff“ Dextre zuvor das ein Multifunktionswerkzeug. Am zweiten Tag (15. Januar) wurde diese Kappe verstaut und zur Behebung des Software-Problems eine Pause eingelegt.
Fortgesetzt wurde am 17. Januar mit dem Durchtrennen zweier weiterer Sicherungskabel und dem Verstauen der beiden Werkzeuge. Am 22. Januar wurde zunächst ein spezielles Tool an einem Arm angesteckt, mit dem Abdeckkappen von einem Nachfüllstutzen entfernt und in einem speziellen Behälter untergebracht werden können. Nach einem Test wurde die zweite Sicherungskappe abgezogen und anschließend das Werkzeug wieder verstaut.

(Bild: NASA-TV)
Am 23. Januar wurde nun das Nachfüllwerkzeug ausgewählt und montiert. Außerdem benutzte Dextre seinen zweiten Arm dazu, sich an der Struktur festzuhalten. Mit dem Nachfüllwerkzeug, das in der Lage ist, eine Ventilmutter zu lockern und durch einen innenliegenden Schlauch Äthanol in den Tank der RRM zu füllen, wurden am 24. und 25. Januar die letzten Arbeiten durchgeführt. Anschließend wurde die Ventilmutter wieder festgezogen, ein Schnellverschluss übergestülpt und das Werkzeug wieder an seinen Platz gebracht.
Damit war das Experiment mit einer kleinen Verzögerung erfolgreich abgeschlossen worden. Beteiligt waren Techniker der NASA und der kanadischen Weltraumagentur CSA. Die auszuführenden Kommandos kamen vom Marshall Space Flight Center in Huntsville (USA).