Es ist der japanische Beitrag zur ISS: Das Labormodul JEM Kibo ist das Zentrum für die Forschungen der Japaner. Mit Kibo können sowohl Experimente im Inneren als auch im offenen Weltraum durchgeführt werden.
Ein Beitrag von Daniel Maurat.
| Maße | |
| Länge: | 20,5 Meter |
| Breite: | 4,4 Meter |
| Höhe: | 8,6 Meter |
| Masse: | 24,1 t |
| Start: | 11.3.2008, 31.5.2008, 15.7.2009 |
Das japanische Labormodul JEM (Japanese Experiment Module für Japanisches Experimentemodul) Kibo (japanisch für Hoffnung) hat, im Gegensatz zu den anderen Labormodulen, eine eigene Schleuse und eine eigene Außenplattform, an der eine Reihe von Experimenten angebracht und zur Untersuchung in das Modul transportiert werden kann. Zudem besitzt es ein eigenes Lagermodul für Experimente und Nachschub.
Entwicklung und Bau
Die Entwicklung von Kibo begann in den 1980ern mit der geplanten US-Raumstation Freedom, als neben ESA und der kanadischen CSA auch Japan in Form der ehemaligen NASDA (heute JAXA) eingeladen wurde, am Programm teilzunehmen. Dabei war schon die heutige Konfiguration aus Hauptmodul, Lagermodul und Außenplattform vorgesehen. Auch nachdem Russland in das Programm einstieg und die Station offizielle zur ISS wurde, blieb Kibo in der Planung erhalten.
Kibo wurde im Tsukuba Space Center in der Nähe von Tokio gebaut. Von dort aus wurden die einzelnen Elemente entweder per Flugzeug oder per Schiff in das Kennedy Space Center gebracht, wo sie in der Space Station Processing Facility auf den Start vorbereitet wurden.
Aufbau
Kibo besteht aus drei Hauptelementen:

- Das Pressurized Module (PM für unter Druck stehendes Modul) ist das Hauptmodul von Kibo. Es ist eine Röhre aus Aluminium, misst 11,2 Meter in der Länge, hat einen Durchmesser von 4,4 Meter, wiegt etwa 15,9 Tonnen und ist das größte Modul des US-basierten Teils der ISS. Es besitzt einen passiven, von Harmony besetzten Common Berthing Mechanism CBM und einen aktiven CBM in Richtung Zenit (oben) am Stirnende, wo das ELM angekoppelt ist. Das Modul besitzt am Stirnende auch einen speziellen Kopplungsmechanismus, an dem die Außenplattform angebracht ist. Über diesem Kopplungsadapter befindet eine Schleuse, über die Experimente auf die Außenplattform und zurück in das Modul gelangen. Zusätzlich zur Schleuse verfügt das PM über einen eigenen Roboterarm, den JEM-RMS (JEM Remote Manipulator System für JEM Ferngesteuertes Manipulatorsystem), mit dem die Experimente an ihren Platz gebracht werden. Er befindet sich in der Nähe der Schleuse. Der Roboterarm besteht aus zwei Teilen: dem längeren Main Arm (engl. für Hauptarm) und dem kleineren Small Fine Arm (SFA für kleiner, feiner Arm). Der Hauptarm ist 9,9 Meter lang, wiegt sieben Tonnen, besitzt sechs Gelenke und lässt sich von einer Konsole an der Schleuse des PM aus steueren. Hier gibt es auch zwei Fenster, damit der bedienende Raumfahrer den Arm sehen kann. Der SFA ist nur 2,2 Meter lang, hat ebenso wie der Hauptarm, sechs Gelenke und kann gegebenenfalls am Hauptarm angebracht werden. Er kann präzise Arbeiten ausführen, wie das Öffnen eines Experimentes. Dadurch können aufwändige Außenbordarbeiten eingespart werden. Im Inneren ist Platz für 23 Rack, wovon elf mit Einheiten besetzt sind, welche die Systeme in Kibo steuern. Die restlichen zwölf Plätze können für Experimente genutzt werden.
- Das Experiment Logistics Module- Pressurized Section (ELM-PS für Experimenten-Lagermodul – unter Druck stehende Sektion), auch ein Zylinder aus Aluminium mit einer Länge von 4,2 Meterm, einem Durchmesser von 4,4 Meter und einer Masse von 4,2 Tonnen, ist ein kleineres Modul, das am PM angekoppelt ist. Es besitzt einen passiven CBM am Nadir-Ende, mit dem es mit dem PM verbunden ist und einen spezeillen Kopplungsmechanismus, der sogenannten Exposed Facility Unit (EFU für Außenlagereinheit) für die Außenplattform. Dieser ist nötig, weil hier machmal Experimente oder Paletten, die Experimente transportieren, zwischengelagert werden müssen. Zudem ist das Modul eigentlich darauf ausgerichtet, ähnlich den MPLMs regelmäßig zur Erde zurückgebracht zu werden, wo es mit neuen Gütern beladen werden sollte. Dazu wäre allerdings ein Transport durch einen Space Shuttle erfordelich, was allerdings entfällt. Im Inneren des ELM-PS ist Platz für acht Racks, die vor allem zur Lagerung von Experimenten und Nachschub für Kibo dienen.
- Die Exposed Facility (EF für Außenanlage) ist, wie der Name schon sagt, die Außenplattform von Kibo, auf der Experimente im Vakuum des Weltraums durchgeführt werden können. Die EF ist 5,6 Meter lang, 5,0 Meter breit, 4,0 Meter hoch und wiegt 4,1 Tonnen. Es hat zwölf spezielle Ankopplungspunkte, ein EFBM (Exposed Facility Berthing Mechanism für Außenanlage-Kopplungsmechanismus), mit dem das EF mit dem PM verbunden ist, sowie elf EFUs, eines für die Lagerung von Paletten mit neuen Expeimenten und deren Bestandteilen sowie zehn für verschiedene Experimente. Dazu zählen beispielsweise die Messung kosmischer Strahlung, die Beobachtung der Erdatmosphäre und der Ozeane, die Erprobung neuer Kommunikationstechniken und vieles mehr. Diese Experimente sind entweder in speziellen sogenannten EF-Equipment Exchange Units (EF-EEU für EF-Equitment Auswechseleinheiten) untergebracht oder direkt auf der EF befestigt. Als Ankopplungssytem besitzen sie eine Payload Interface Unit (PIU für Nutzlast-Verbindungseinheit), das Gegenstück zur EFU. An diesen werden sie angebracht und mit Energie und ggf. Flüssigkeit zur Kühlung versorgt. Sie können auch umgesetzt und ausgetauscht werden. Auf dem EF selbst gibt es Platz für bis zu zwölf Experimente und Ersatzteile für das EF, wobei ein Platz durch die Lagerungseinheit des Small Fine Arm besetzt ist. Ein Teil des EF ist auch das ELM-ES (ELM Exposed Section für ELM Außensektion), einer Art Palette, auf der EF-EEUs gelagert und gestartet werden können. Das ELM-ES kann entweder mit einem Shuttle oder einem japanschen HTV gestartet werden und dann entweder an einen EFU am Logistikmodul ELM-ES oder an der Außenplattform EF angebracht. Nachdem die Nutzlast verladen wurde, wird das ELM-ES entweder wieder in das Shuttle oder in einer speziellen Versoin es EP (Exposed Palett für Außenpalette) das HTV geladen. Das ELM-ES kann drei EF-EEUs aufnehmen, das EP zwei.
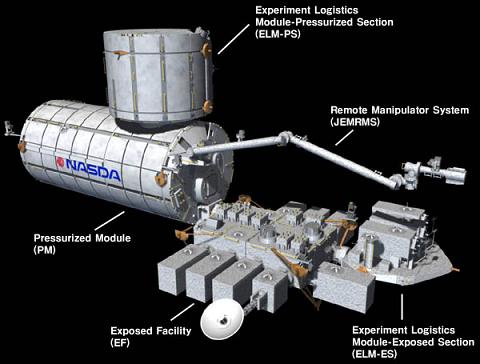
(Bild: NASA)
Im Orbit
Kibo wurde während dreier Shuttlemissionen installiert:
- Bei der Mission STS 123 des Space Shuttles Endeavour, die am 11. März 2008 startete, wurde das Logistikmodul ELM-PS zur ISS gebracht. Am 14. März wurde es vorübergehend an Harmony-Zenit angekoppelt. Die Endeavour kehrte am 27. März 2008 zur Erde zurück.
- Bei der Mission STS 124 der Discovery, die am 31. Mai 2008 gestartet wurde, gelangte das Hauptmodul PM zur ISS. Es wurde am 3. Juni mit Hilfe des Stationsmanipulatorarms SSRMS/Canadarm 2 an seinem Kopplungspunkt an Harmony-Backbord montiert. Danach wurde das ELM-PS von Harmony-Zenit zum zweiten Kopplungsstutzen des PM transportiert und dort angekoppelt. Nach Beendigung der Arbeiten landete die Discovery am 14. Juni.
- Bei der Mission STS 127 der Raumfähre Endeavour, gestartet am 15. Juli 2009, wurde schließlich die Außenplattform EF und die Transportpalette ELM-ES zur ISS geliefert. Das EF wurde am 18. Juni an den Experimentalkoplex angedockt und die drei EE-EEUs vom Transportpanel ELM-ES abgeladen und an ihren Bestimmungsorten am EF angekoppelt. Die Endeavour kehrte am 31. Juli zur Erde zurück
Zudem wurden und werden auch Experimente in Form von EF-EEUs mit japanischen HTV-Versorgern in den Orbit gebracht. Dies geschah zum ersten Mal, als HTV 1 am 10. September 2009 vom Tanegashima Space Center in Japan startete. An der ISS angekoppelt, hiefte der SSRMS/Canadarm 2 ein EP-Panel aus dem HTV und übergab es dem japanischen Manipulatorarm JEM-RMS. Dieser koppelte den EP zur Lagerung an der Außenplattform an und entnahm ihm anschließend die beiden EF-EEUs zur Ankopplung an die Außenplattform. Frachttransporter vom HTV-Typ werden mit Absfällen beladen und verglühen nach erfolgter Mission in dichten Schichten der Erdatmosphäre.
Verwandte Webseiten:
- Artikel in Wikipedia
- Informationen zu Kibo auf der NASA-Homepage (engl.)
- Informationen zu Kibo auf der JAXA-Homepage (engl.)
- Datenblatt zu Kibo auf der JAXA-Homepage (engl.)
Diskussion
