Mit der ambitionierten ExoMars-Mission ab 2016 verfolgt die ESA unter anderem das Ziel, 2019 einen Rover zur Erforschung des Marsbodens abzusetzen. In bis zu zwei Metern Tiefe wird nach Hinweisen auf Leben geforscht. Im Rahmen von SAFER (Sample Acquisition Field Experiment) wird derzeit in der Nähe der Europäischen Südsternwarte in der chilenischen Atacama-Wüste mit einem Testrover die Suche nach dafür geeigneten Stellen geübt.
Ein Beitrag von Roland Rischer. Quelle: ESA, SAFER-Blog.
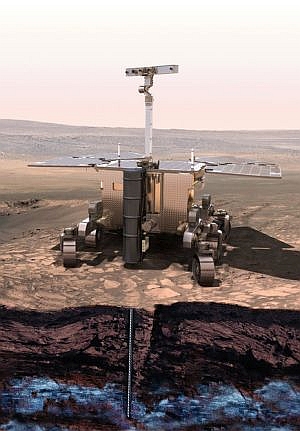
(Bild: ESA)
ExoMars ist ein Projekt der Europäischen Weltraumagentur ESA, mit dem man den Anschluss an die Bodenaktivitäten der NASA auf dem Mars nicht verlieren möchte. Das Vorhaben besteht aus zwei Missionen. Voraussichtlich im Januar 2016 startet der ExoMars Trace Gas Orbiter (ExoMars-TGO) auf Proton M in Baikonur. Er wird im Oktober 2016 am Mars ankommen und mit der Untersuchung von Spurengase in der Marsatmosphäre beginnen. An Bord von ExoMars-TGO befindet sich auch der Landedemonstrator EDM (Entry, Descent and Landing Demonstrator Modul). Die Daten des Landedemonstrators dienen der Vorbereitung des zweiten und für die ESA anspruchsvolleren Teils von ExoMars – dem Absetzen eines Rovers; geplanter Start Mai 2018 und Mars-Ankunft im Januar 2019. Der 310 Kilogramm schwere Mars-Rover führt als augenfälligstes Novum gegenüber den bisherigen Mars-Rovern ein Bohrgestänge mit sich. Er ist damit in der Lage, auf der Suche nach Lebensspuren senkrecht bis zu zwei Meter tief zu bohren. Man rechnet sich eine höhere Erfolgswahrscheinlichkeit der Suche aus, weil derartige Spuren dort vor kosmischer Strahlung und aggressiven Umweltprozessen geschützt sind. Ist der Mars-Rover angekommen, wird Mars-TGO zusätzlich zur Atmosphärenforschung eine Rolle als Relaisstation für die Roverkommunikation übernehmen.
In der chilenischen Atacama-Wüste begannen kürzlich erste Versuche mit einem Testrover namens „Bridget“. Feldversuche dieser Art werden als notwendig erachtet, weil modellhafte Simulationen nicht alle natürlichen Unwägbarkeiten erfassen, und wenn, dann vielleicht nicht richtig abbilden. Die Rover-Tester sind Gast bei der Europäischen Südsternwarte am Mount Paranal. Die Atacama-Wüste wurde als Testgelände ausgewählt, weil sie nach Einschätzung der ESA-Wissenschaftler der auf dem Mars zu erwartenden Umwelt- und Bodenverhältnisse am nächsten kommt. Die Wüste ist eines der trockensten Gebiete der Erde.

(Bild: ESA, RAL Space)
Das Test-Team hat nach Ankunft vor Ort zunächst den Testrover fahrbereit gemacht. Erste Fahrversuche konnten beginnen. Parallel dazu erkundeten andere Team-Mitglieder die Umgebung, um eine passendes Testareal zu finden. Dort sollen Erfahrungen mit drei wissenschaftlichen Instrumenten bei der Suche nach aussichtsreichen Bohrstellen gesammelt und Instrumente und Programme optimiert werden. Das Gebiet mit der größten Mars-Ähnlichkeit wurde nach dem Projektnamen SAFER-Valley benannt. Mit Hilfe einer Drohne wurden Luftbildaufnahmen gemacht und eine Bodenerhebungskarte des SAFER-Valley erstellt. Die Drohne simuliert Aufnahmen aus dem Orbit, wie sie später auch von der Arbeitsumgebung des Mars-Rovers gemacht werden.
Insgesamt sind fünf Testtage angesetzt. Manche Testtage werden als zwei Mars-Tage (Sols) angesehen. Das Testschema sieht am Ende jeden Mars-Tages die Datenübermittlung in das Kontrollzentrum vor. Dort wird die Anschlussroute ausgearbeitet und zum Rover hochgeladen. Diese muss er dann am nächsten Sol autonom bewältigen. Bei der Kommunikation simuliert man die engen Zeitfenster für eine Datenkommunikation und den deshalb begrenzten Datenfluss vom und zum Rover.

(Bild: ESA, Michel van Winnendael)
Am 8. Oktober 2013 wurde Bridget mit drei von später einmal elf Instrumenten bestückt: einer 3D-Panoramakamera für den Rundumblick, einer Kamera (CLUPI Close-up Imager) für hochauflösende Bilder (bis zu einem Tausendstel Millimeter Auflösung) im Nahbereich (50 cm) und einem Bodenradar (WISDOM) für den Blick in die obere Bodenschicht. Bridget soll so sowohl felsigen als auch losen Untergrund lokalisieren können. Beim Start der Versuchsreihe musste man mangels Vortagesdaten zwangsläufig leicht improvisieren. Am Vorabend wurden Panoramaaufnahmen der Rover-Umgebung an das Kontrollzentrum in Harwell geschickt. Zusammen mit der Bodenerhebungskarte musste das dortige Team eine erste Entscheidung treffen, welchen Route Bridget am folgenden Tag zuerst einschlagen sollte. Die Route wurde am Dienstagmorgen in den Bordcomputer des Rovers geladen und die erste Testfahrt konnte beginnen. Die Premiere lief nicht nicht ohne die Korrektur von Softwarefehlern und manuellen Eingriffen vor Ort ab, bildete aber die etwas umfassendere die Basis zur Festlegung der nächsten Route durch das britische Kontrollzentrum. Auch ‚Bohrproben‘ werden im Rahmen der Versuche zur Untersuchung durch den CLUPI entnommen, allerdings in der Atacama-Wüste von Hand mit Spitzhacke und Schaufel, dies aber für die Mitarbeiter im fernen Kontrollzentrum quasi unmerklich. Daran sieht man, bis zu einem Mars-fähigen Rover-Modell ist es noch ein weiter Weg.
Der SAFER-Feldversuch wird vom ESA-Direktorat für Technik und Qualitätsmanagement begleitet. Das involvierte Konsortium bestehend aus elf Firmen und Instituten wird von der britischen RAL Space geführt, ein Ableger des UK Science & Technology Facilities Council im Rutherford Appleton Laboratory in Harwell. Finanziert werden die Versuche im Rahmen des ESA-Programmes zur Erforschung von Grundlagentechniken und durch UK Space Agency. Der Testrover wurde von Astrium in Stevenage (UK) hergestellt. Der Test dient nicht der eigentlichen Entwicklung des Mars-Rovers, sondern der Entwicklung von Prozeduren für den späteren Roverbetrieb auf dem Mars. Auch die eingebundenen Unternehmen sind nicht alle am Bau des endgültigen Mars-Rovers beteiligt.
Diskutieren Sie mit:
