Auf seinem Weg zu dem Zentralberg des Gale-Kraters versucht der Marsrover Curiosity gegenwärtig, ein mit sandigem Untergrund bedecktes Tal zu durchqueren. Die dabei auftretenden Probleme könnten jetzt allerdings zu einer erneuten Änderung der zwischenzeitlich vorgesehenen Route führen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: USGS, JPL, The Planetary Society, UMSF.
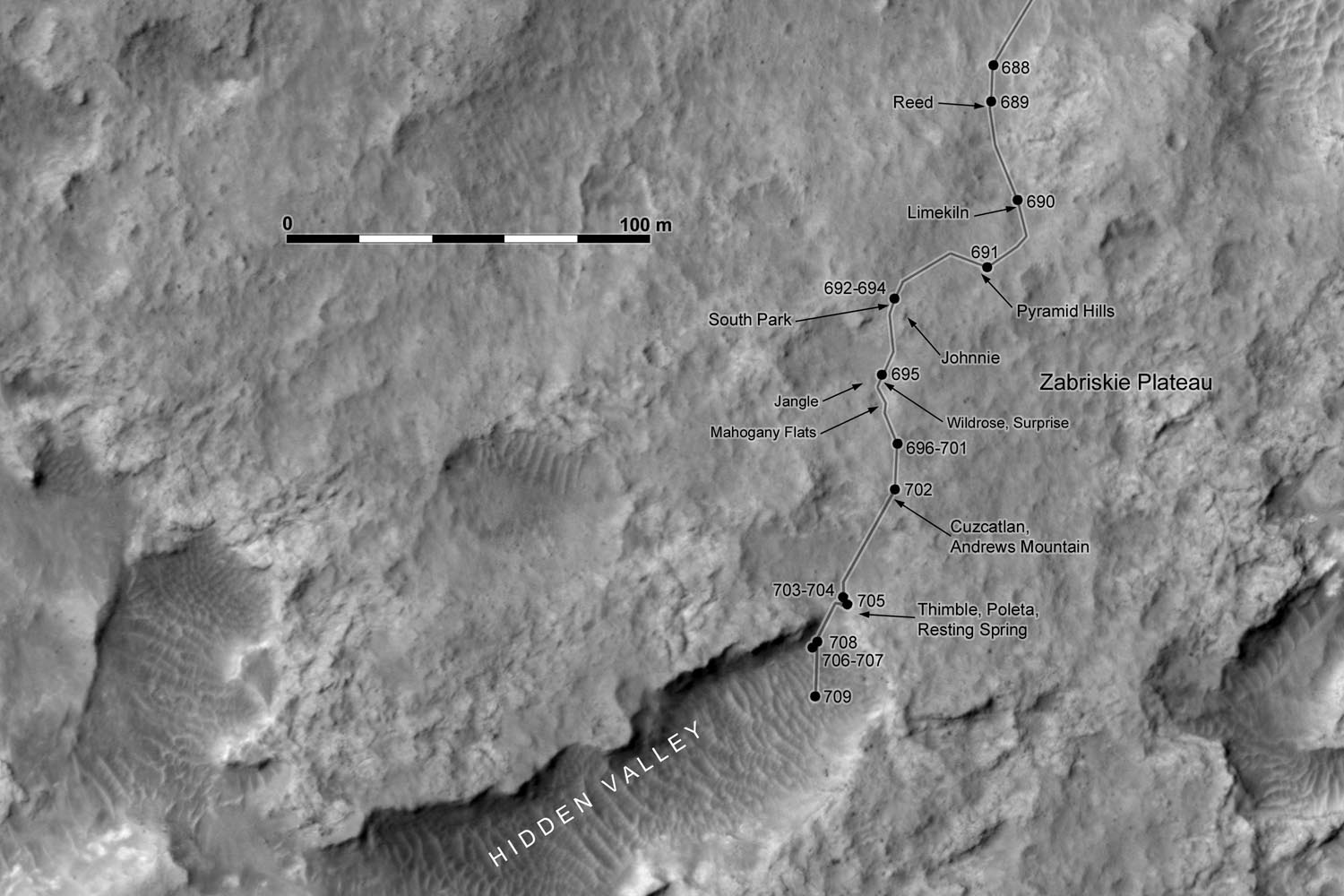
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Auch während der letzten Wochen hat sich der von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrovers Curiosity im Rahmen von mehreren Fahrten weiter auf sein nächstes ‘großes Ziel’ zu bewegt. Hierbei handelt es sich um eine mit dem Namen “Murray Buttes” belegte Region an der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons. Bis zum Erreichen von “Murray Buttes” muss Curiosity noch fast vier weitere Kilometer zurücklegen.
Steiniges Gelände soll möglichst vermieden werden
Bereits zu Beginn des Jahres 2014 hatten sich die für die Durchführung der Curiosity-Mission verantwortlichen Mitarbeiter der NASA dazu entschlossen, den Rover zukünftig auf einer Route zu bewegen, welche möglichst wenig Steine oder felsigen Untergrund beherbergt. Auf diese Weise, so der Grund für diese Vorgehensweise, sollen die sechs Räder des Rovers geschont werden. Jedes dieser Räder verfügt über einen Durchmesser von 51 Zentimetern und eine Breite von 40 Zentimetern. Die lediglich 0,75 Millimeter starken Laufflächen dieser Räder, auf denen das gesamte Gewicht des 899 Kilogramm schweren Rovers lastet, bestehen aus einer Aluminiumlegierung und sind mit verschiedenen Querrippen an den Oberseiten und Ringen an den Innenwänden verstärkt.
Bereits im Rahmen der ausführlichen Tests, welche im Vorfeld der Mission auf der Erde durchgeführt wurden, zeigte sich, dass diese Räder bei ihrem Einsatz auf dem Mars nach einer gewissen Zeit verschiedene Beschädigungen wie zum Beispiel Dellen, aber auch Löcher und Risse aufweisen würden. Diese zu erwartenden Beschädigungen wurden von den für die Planung der Mission verantwortlichen Ingenieuren der NASA als für die Mission nicht bedrohlich eingeschätzt. Auch mit erheblich beschädigten Laufflächen, so zum Beispiel Matt Heverly, der Leiter des für die Steuerung von Curiosity verantwortlichen ‘Roverdriver-Teams’, wird der Rover auch weiterhin in der Lage sein, seine Fahrt fortzusetzen.

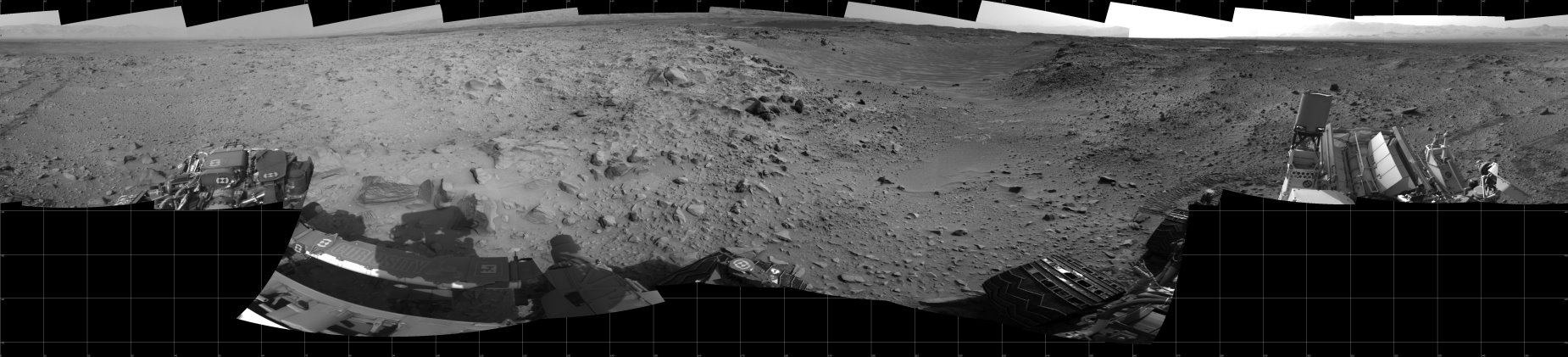
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Und tatsächlich – schon nach wenigen Fahrten über die Marsoberfläche zeigten sich bereits im Jahr 2012 auf den Laufflächen der Räder einzelne Kratzer und Dellen. In der Folgezeit bildeten sich zudem verschiedene Löcher und teilweise mehrere Zentimeter lange Risse. Diese zuletzt vermehrt auftretenden ‘Abnutzungserscheinungen’ resultieren laut den Einschätzungen der in die Mission eingebundenen Techniker und Ingenieure daraus, dass Curiosity speziell im vierten Quartal des Jahres 2013 ein Gelände überquerte, auf dessen felsigen Untergrund sich eine Vielzahl zwar nur wenige Zentimeter großer, dafür aber scharfkantiger Steine befand. Beim Überfahren dieser Steine traten dann die Mehrzahl der jetzt zu beobachtenden Beschädigungen auf.
Aus diesem Grund wurde schließlich auch die zukünftige Route leicht abgeändert, so dass Curiosity einen größtenteils sandigen Untergrund zu überqueren hat. Anfang Juli 2014 sammelten die Roverdriver dabei weitere Erfahrungen mit dem Passieren von Sanddünen. Hierbei handelte es sich um Informationen, welche bei dem Passieren des zukünftig zu überquerenden Geländes von Nutzen sein werden.
Mit einer weiteren Fahrt über rund 82 Meter erreichte Curiosity schließlich am 14. Juli 2014 den nordwestlichen Rand einer mit dem Namen “Zabriskie Plateau” belegten Oberflächenformation, welche nicht mit Sand sondern vielmehr erneut mit einer Vielzahl an kleinen und relativ spitzen Steinen bedeckt war. Aufgrund des jetzt wieder deutlich unebeneren und unwegsamen Geländes benötigte der Rover 17 Tage, um das etwa 200 Meter lange Plateau im Rahmen von neun einzelnen Fahrten zu überqueren. Neben den Kamerasystemen wurden hierbei auch mehrfach das APX-Spektrometer und die ChemCam – zwei der insgesamt zehn wissenschaftlichen Instrumente an Bord von Curiosity – dazu eingesetzt, um verschiedene interessante Gesteinsformationen im Detail zu untersuchen. Nach seiner Fahrt am 31. Juli 2014, dem “Sol” 705 seiner Mission, hatte der Marsrover Curiosity das “Zabriskie Plateau” überquert, ohne dass weitere nennenswerte Komplikationen auftraten.
“Die Räder haben beim Überqueren des Zabriskie Plateau einige weitere Beschädigungen erlebt. Diese fallen allerdings geringer aus, als ich aufgrund der Anzahl der dort befindlichen scharfkantigen Steine erwartet habe”, so Jim Erickson, der zuständige Projektmanager der Curiosity-Mission vom Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien. “Die Roverdriver haben bewiesen, dass sie in der Lage sind, die wirklich schlimmen Felsen zu erkennen und erfolgreich zu umfahren.”
(Bild: NASA, JPL-Caltech)
Das Hidden Valley
Curiosity befand sich jetzt unmittelbar vor dem “Hidden Valley”, einem rund 150 Meter langen und bis zu 45 Meter breiten Tal, dessen Untergrund wieder mit einer dicken Sandschicht bedeckt ist.
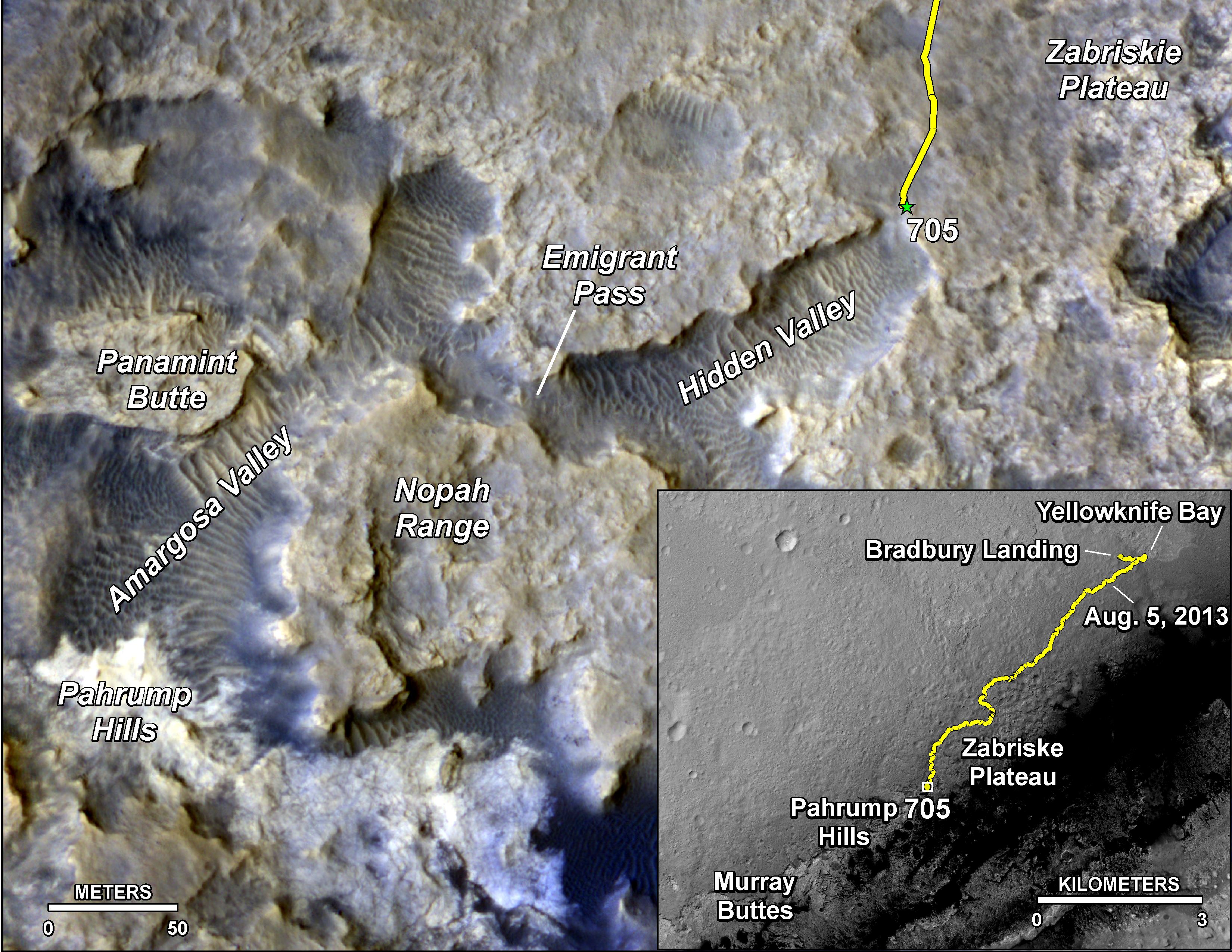
(Bild: NASA, JPL-Caltech, University of Arizona)
Laut den Planungen soll Curiosity zunächst das “Hidden Valley” und anschließend das angrenzende “Amargosa Valley” durchqueren. Das dabei angepeilte Ziel ist die noch knappe 500 Meter vom aktuellen Standort entfernt gelegene Region “Pahrump Hills”. Die dortigen Gesteinsaufschlüsse werden als eine geologische Formation angesehen, welche in einem direkten Zusammenhang mit der Basis des Zentralberges Aeolis Mons steht. Hier, so die an der Curiosity-Mission beteiligten Wissenschaftler, bietet sich dem Rover erstmals die Möglichkeit, mit dem Aeolis Mons assoziierte Gesteine im Detail zu studieren.
“Dort werden wir den ersten Vorgeschmack auf eine geologische Formation erhalten, die Teil der Basis des Berges und nicht des Kraterbodens ist”, so John Grotzinger vom California Institute of Technology in Pasadena/Kalifornien, der für die Curiosity-Mission verantwortliche Projektwissenschaftler.
Sandiger Untergrund führt zu einem ‘Durchdrehen’ der Räder
Am 1. August 2014 erfolgte die Einfahrt des Rovers in das “Hidden Valley”. Aufgrund des sandigen Untergrundes gingen die Roverdriver dabei besonders vorsichtig vor.
Wie bereits seine Vorgänger Spirit und Opportunity verfügt auch Curiosity über mehrere Gefahrenerkennungs- und Navigationskameras. Jeweils zwei dieser Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab. Diese Aufnahmen werden von der ‘Drive-Software’ des Rovers zu Stereoaufnahmen kombiniert – im Gegensatz zu konventionellen 2D-Aufnahmen ergibt sich bei stereoskopischen Aufnahmen auch ein räumlicher Eindruck der Landschaft – und anschließend autonom ausgewertet. Aus den so gewonnenen Informationen berechnet die Software von Curiosity anschließend den millimetergenauen Standort des Rovers auf der Marsoberfläche.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Diese Aufnahmen dienen unter anderem dazu, um regelmäßig zu überprüfen, ob der Rover auf dem vorherigen Teilabschnitt einer Fahrtetappe eventuell von der vorgesehenen Route ‘abgedriftet’ ist oder nicht den dabei vorgesehenen Geländegewinn erzielt hat. Stimmt die ‘berechnete’ Position nicht mit der tatsächlich erreichten Position überein und wird dabei eine von den Roverdrivern im Vorfeld der Fahrt vorgegebene ‘Toleranzschwelle’ überschritten, so hat dies einen automatisch erfolgenden Abbruch der Fahrt zur Folge.
Es zeigte sich, dass bei der Einfahrt in das “Hidden Valley” anstatt der dabei vorgesehenen 30 Meter in Wirklichkeit lediglich eine Strecke von etwa 22 Metern zurückgelegt wurde. Eine weitere Fahrt am 4. August wurde nach lediglich 16 Metern sogar vorzeitig abgebrochen. Der Grund für diesen Abbruch war der sandige Untergrund. Auf einer vorprogrammierten Entfernung von theoretisch 4,5 Metern sollte Curiosity im Rahmen dieser Fahrt über sandiges Gelände einen Geländegewinn von mindestens zwei Metern erreichen. Als die ‘Drive-Software’ des Rovers dann jedoch feststellte, dass dieses Resultat aufgrund eines zu hohen Schlupfes nicht mehr erreicht wurde, erfolgte – wie für diesen Fall vorgesehen – ein automatischer Abbruch der Fahrt.
Die Roverdriver dirigierten Curiosity in den folgenden Tagen wieder in Richtung des Einstiegspunktes in das “Hidden Valley”, beobachteten und analysierten den dabei erreichten Geländegewinn und den auftretenden Schlupf und werteten die Fotoaufnahmen aus, welche die Kameras des Rovers dabei von den ‘Spuren’ der Räder im Sand anfertigten. Aus diesen Daten der Interaktion der Räder mit dem Sand soll eine alternative Fahrweise entwickelt werden, welche es trotz des lockeren Untergrundes ermöglichen könnte, das Innere des “Hidden Valley” für die zukünftigen Fahrten zu benutzen.
Eine Möglichkeit dafür wäre, dass die entsprechenden Sicherheitsparameter neu überdacht und bei zukünftigen Fahrten niedriger angesetzt werden. Eine solche Vorgehensweise beinhaltet allerdings auch das nicht zu unterschätzende das Risiko, dass sich die Räder von Curiosity bei einer zukünftigen Fahrt so tief in den Sand eingraben, dass der Rover dabei Gefahr läuft, sich im lockeren Untergrund festzufahren.

(Bild: NASA, JPL-Caltech)
Derzeit befindet sich Curiosity wieder außerhalb des “Hidden Valley” auf ‘stabilem Untergrund’. In den nächsten Tagen wollen die an der Mission beteiligten Wissenschaftler und Ingenieure über die weitere Vorgehensweise beratschlagen und die damit verbundenen Vor- und Nachteile abwägen. Soll Curiosity einen neuen Versuch der Durchquerung des “Hidden Valley” starten oder soll dieses Tal an dessen nördlichen oder südlichen Rand ‘umfahren’ werden?
Bis zum heutigen Tag, dem Sol 715 seiner Mission, hat der Marsrover Curiosity rund 8.700 Meter auf der Marsoberfläche zurückgelegt. Dabei hat der Rover mit seinen Kamerasystemen inzwischen 173.858 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net:
