In dieser Woche feiern die Betreiber der ISS, hauptsächlich die NASA und die kanadische Weltraumagentur CSA, eine Dekade fehlerfreien Betrieb des in Kanada hergestellten „Baukran der Station“. (Newsbild: Stephen Robinson während STS 114)
Ein Beitrag von Ralf Möllenbeck. Quelle: NASA, Raumfahrer.net, CSA.

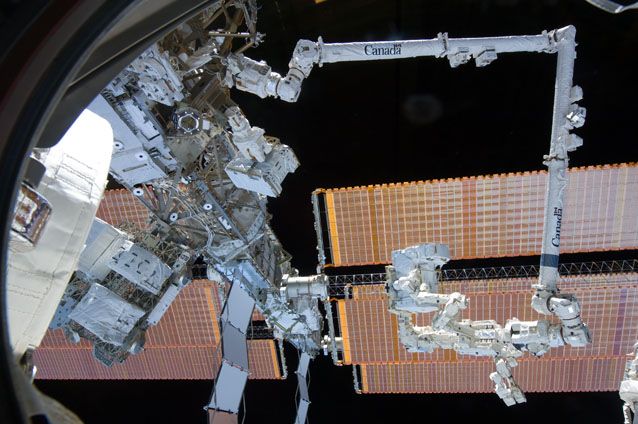
(Bild: NASA)
Seit nunmehr zehn Jahren ist der kanadische Roboterarm Canadarm2 an der Internationalen Raumstation im Einsatz. Seine erfolgreiche Nutzung und Größe ist bisher einmalig in der bemannten Raumfahrt. Konstruiert und gebaut wurde der Stationsroboterarm im Auftrag der CSA von dem Unternehmen MDA Space Missions. Er gelangte am 19. April 2001, während der STS-100-Mission mit der Endeavour, ins All und wurde an der ISS bei zwei Außeneinsätzen auf seine ersten Aufgaben vorbereitet. Bei diesem Shuttle-Flug kam erstmals ein kanadischer Astronaut bei einer Außenmission an der ISS zu Einsatz, Chris Hadfield wurde damals von dem NASA-Astronauten Scott Parazynski unterstützt.
Technisch gesehen ist das offiziell SSRMS (Space Station Remote Manipulator System) genannte Element ein mehrteiliger, ca. 18 Meter langer und durch Gelenke verbundener Ausleger. Dieser in mehreren Achsen bewegliche Manipulator ist nicht fest mit der Station verbunden, sondern hat an jedem Ende einen Greifmechanismus, Latching End Effector genannt. Dadurch kann er, von vier Kameras unterstützt und über Konsolen in der Station aber auch von der Erde aus gesteuert, von einem Haltepunkt zum nächsten umgesetzt werden. An jedem Haltepunkt, PDGF (Power and Data Grapple Fixture), gibt es eine mechanische sowie auch Daten- und Stromverbindung. Als Bestandteil des MSS (Mobile Servicing System) kann der Roboterarm ebenso am MBS (Mobile Base System) durch den MT (Mobile Transporter) auf der Gitterstruktur der Station in Querrichtung verfahren werden, um dort Arbeiten beim Stationsaufbau oder bei Servicemissionen zu unterstützen.
Derartig mobil ausgelegt, war und ist Canadarm2 ein zentrales Element im Stationsausbau. Während seiner bisherigen Missionszeit hat der selbst nur knapp zwei Tonnen wiegende Arm mehrere hundert Tonnen Ausrüstung, Module und Fracht bewegt. Weiter unterstützte er Astronauten bei fast 100 Außeneinsätzen und fing die japanischen Transportraumschiffe HTV 1 und 2 ein. Im Jahre 2006 war Steve MacLean, nun ehemaliger Astronaut und der gegenwärtige Präsident der kanadischen Raumfahrtbehörde, der erste Kanadier, welcher am und mit dem Stationsarm arbeitete. Etwas später kamen die CSA-Astronauten Julie Payette und Robert Thirsk ebenfalls zu der Ehre mit Canadarm2 arbeiten zu können.
Obwohl der Arm mehr als 100 Tonnen bewegen kann, dient er häufig als Plattform für Astronauten bei ihren Außenmissionen. Dabei ist umso mehr eine exakte Steuerung nötig. Diese erfolgt heute in den meisten Fällen von der Arbeitsstation im Aussichtsmodul Cupola, eine Ersatzsteuerstation befindet sich im Destiny-Modul. Des Weiteren kann eine vollständige Überwachung und Steuerung von den Flugkontrolleuren am Johnson Space Center in Houston und dem Hauptquartier der kanadischen Raumfahrtbehörde in Saint-Hubert, Quebec erfolgen. Von dort aus wird auch eine wichtige Erweiterung des Manipulators gesteuert. Der Dextre (Special Purpose Dextrous Manipulator) genannte Zusatz kommt ebenfalls aus Kanada und soll komplizierte Tätigkeiten ausführen, welche sonst nur während eines Weltraumausstieges möglich sind. Dextre verfügt über zwei siebengelenkige Roboterarme, eine Halterung für Werkzeuge, eine Plattform sowie diverse Lampen und Kameras. An den Enden der beiden Arme befinden sich Aufnahmen mit denen verschiedenste Werkzeuge gegriffen werden können.
Zukünftig wird die Rolle des Stationsarms, nach dem Ende der Space-Shuttle-Flüge, eine etwas andere sein. Er wird seltener große Module bewegen und befestigen, eher werden seine Aufgaben in der Wartung der Station, Unterstützung bei Außeneinsätzen der ISS-Besatzung und Einfangen von Raumfahrzeugen bestehen. Der jetzige HTV-Versorger der JAXA und die zukünftigen Transportraumschiffe Dragon von Space Exploration Technologies (SpaceX) und Cygnus der Orbital Sciences Corporation (OSC) verfügen über keine automatischen Kopplungssysteme, sondern werden durch Canadarm2 eingefangen und angekoppelt. Alleine in dem Zeitraum Ende 2011 bis Anfang 2012 werden innerhalb von sieben Monaten sechs Raumfahrzeuge, beginnend mit Dragon geplant Oktober 2011, erwartet. Daher kommt dem SSRMS zukünftige eine zentrale Rolle bei der Versorgung und dem Unterhalt der ISS zu.
Raumcon: